Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePossible Controllability of Control Argumentation Frameworks -- Extended Version
Paper and Code
Sep 10, 2020

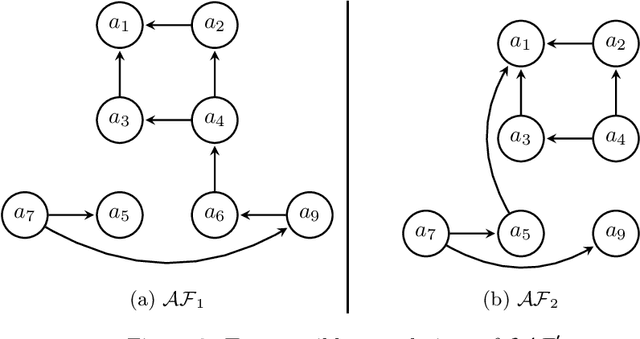
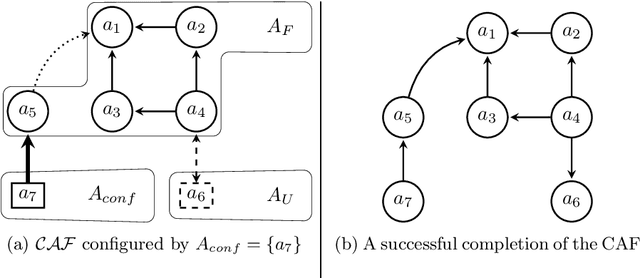
The recent Control Argumentation Framework (CAF) is a generalization of Dung's Argumentation Framework which handles argumentation dynamics under uncertainty; especially it can be used to model the behavior of an agent which can anticipate future changes in the environment. Here we provide new insights on this model by defining the notion of possible controllability of a CAF. We study the complexity of this new form of reasoning for the four classical semantics, and we provide a logical encoding for reasoning with this framework.
* Extended version of a paper accepted at the 8th International
Conference on Computational Models of Argument, 15 pages, 3 figures
View paper on