 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePose Imitation Constraints for Collaborative Robots
Paper and Code
Oct 12, 2020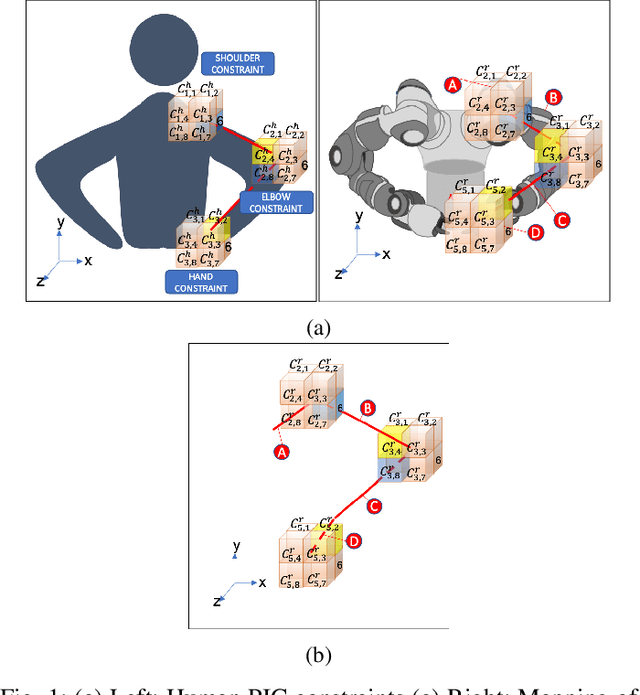

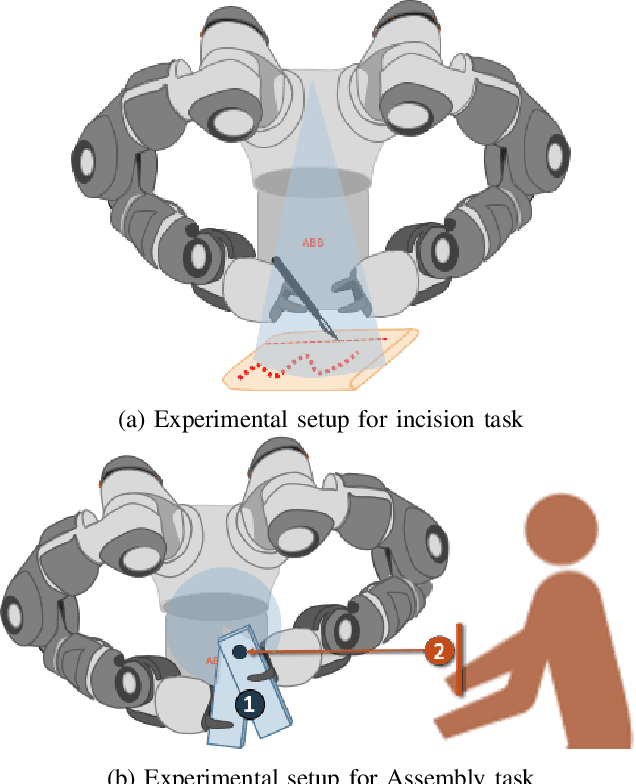
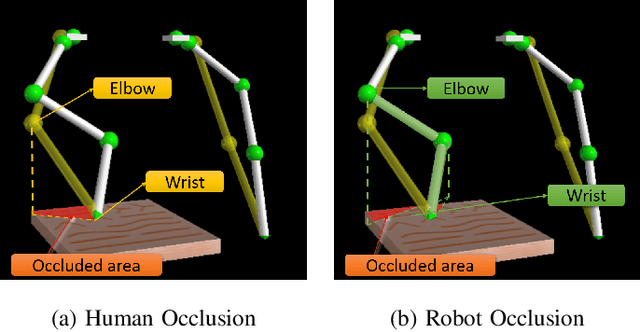
Achieving human-like motion in robots has been a fundamental goal in many areas of robotics research. Inverse kinematic (IK) solvers have been explored as a solution to provide kinematic structures with anthropomorphic movements. In particular, numeric solvers based on geometry, such as FABRIK, have shown potential for producing human-like motion at a low computational cost. Nevertheless, these methods have shown limitations when solving for robot kinematic constraints. This work proposes a framework inspired by FABRIK for human pose imitation in real-time. The goal is to mitigate the problems of the original algorithm while retaining the resulting humanlike fluidity and low cost. We first propose a human constraint model for pose imitation. Then, we present a pose imitation algorithm (PIC), and it's soft version (PICs) that can successfully imitate human poses using the proposed constraint system. PIC was tested on two collaborative robots (Baxter and YuMi). Fifty human demonstrations were collected for a bi-manual assembly and an incision task. Then, two performance metrics were obtained for both robots: pose accuracy with respect to the human and the percentage of environment occlusion/obstruction. The performance of PIC and PICs was compared against the numerical solver baseline (FABRIK). The proposed algorithms achieve a higher pose accuracy than FABRIK for both tasks (25%-FABRIK, 53%-PICs, 58%-PICs). In addition, PIC and it's soft version achieve a lower percentage of occlusion during incision (10%-FABRIK, 4%-PICs, 9%-PICs). These results indicate that the PIC method can reproduce human poses and achieve key desired effects of human imitation.