 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParallel Bayesian Optimization of Agent-based Transportation Simulation
Paper and Code
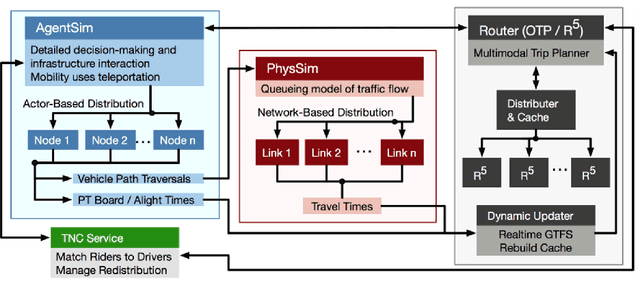
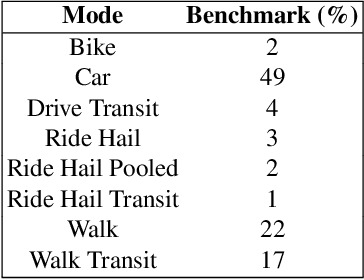
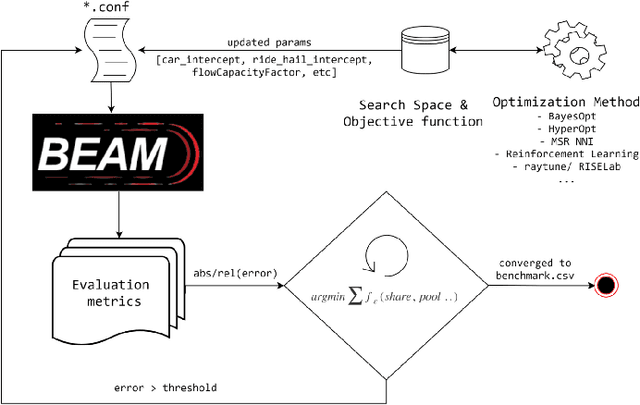
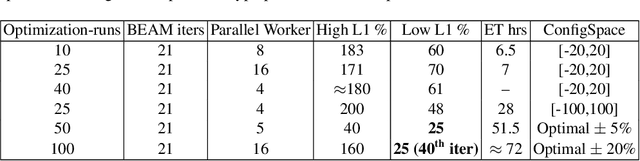
MATSim (Multi-Agent Transport Simulation Toolkit) is an open source large-scale agent-based transportation planning project applied to various areas like road transport, public transport, freight transport, regional evacuation, etc. BEAM (Behavior, Energy, Autonomy, and Mobility) framework extends MATSim to enable powerful and scalable analysis of urban transportation systems. The agents from the BEAM simulation exhibit 'mode choice' behavior based on multinomial logit model. In our study, we consider eight mode choices viz. bike, car, walk, ride hail, driving to transit, walking to transit, ride hail to transit, and ride hail pooling. The 'alternative specific constants' for each mode choice are critical hyperparameters in a configuration file related to a particular scenario under experimentation. We use the 'Urbansim-10k' BEAM scenario (with 10,000 population size) for all our experiments. Since these hyperparameters affect the simulation in complex ways, manual calibration methods are time consuming. We present a parallel Bayesian optimization method with early stopping rule to achieve fast convergence for the given multi-in-multi-out problem to its optimal configurations. Our model is based on an open source HpBandSter package. This approach combines hierarchy of several 1D Kernel Density Estimators (KDE) with a cheap evaluator (Hyperband, a single multidimensional KDE). Our model has also incorporated extrapolation based early stopping rule. With our model, we could achieve a 25% L1 norm for a large-scale BEAM simulation in fully autonomous manner. To the best of our knowledge, our work is the first of its kind applied to large-scale multi-agent transportation simulations. This work can be useful for surrogate modeling of scenarios with very large populations.