 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOvertwisting and Coiling Highly Enhances Strain Generation of Twisted String Actuators
Paper and Code
Sep 23, 2022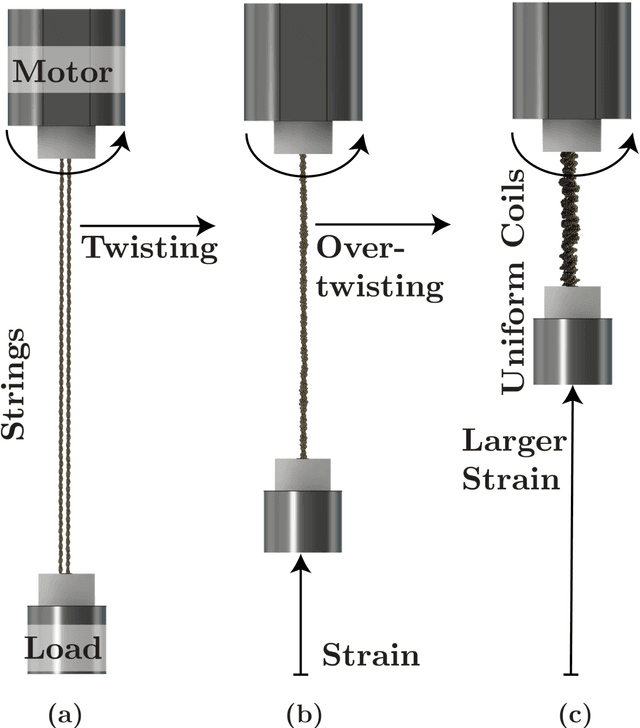
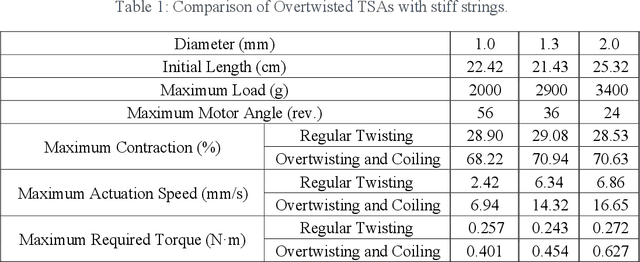
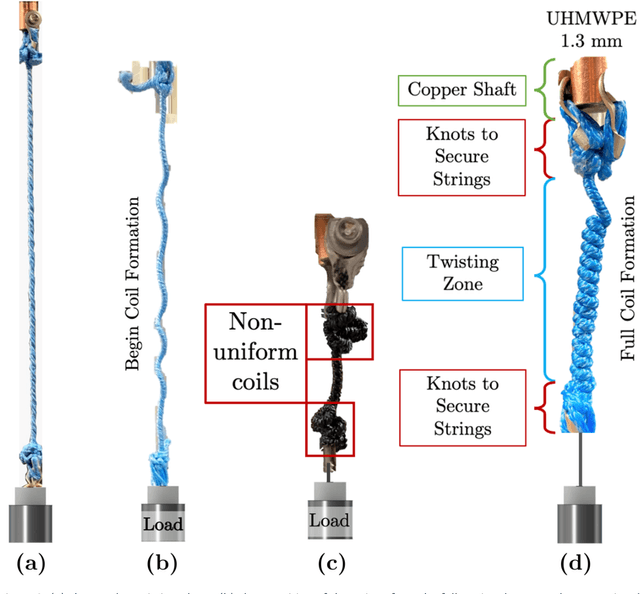
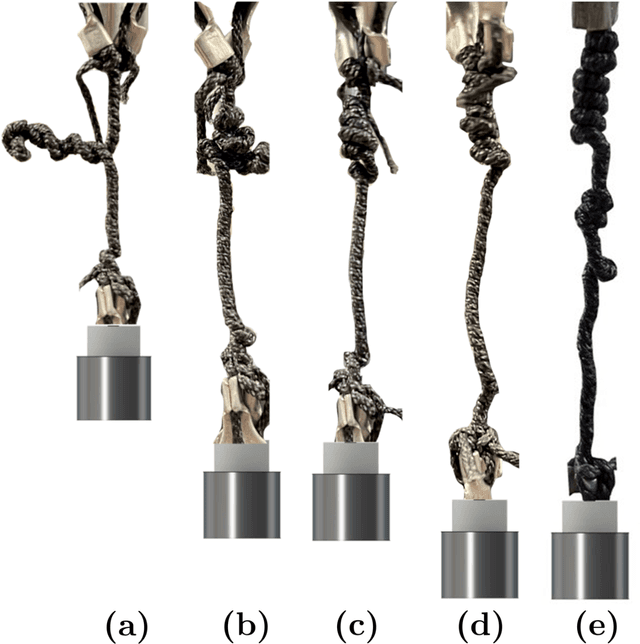
Twisted string actuators (TSAs) have exhibited great promise in robotic applications by generating high translational force with low input torque. To further facilitate their robotic applications, it is strongly desirable but challenging to enhance their consistent strain generation while maintaining compliance. Existing studies predominantly considered overtwisting and coiling after the regular twisting stage to be undesirable non-uniform and unpredictable knots, entanglements, and coils formed to create an unstable and failure-prone structure. Overtwisting would work well for TSAs when uniform coils can be consistently formed. In this study, we realize uniform and consistent coil formation in overtwisted TSAs, which greatly increases their strain. Furthermore, we investigate methods for enabling uniform coil formation upon overtwisting the strings in a TSA and present a procedure to systematically "train" the strings. To the authors' best knowledge, this is the first study to experimentally investigate overtwisting for TSAs with different stiffnesses and realize consistent uniform coil formation. Ultra-high molecular-weight polyethylene (UHMWPE) strings form the stiff TSAs whereas compliant TSAs are realized with stretchable and conductive supercoiled polymer (SCP) strings. The strain, force, velocity, and torque of each overtwisted TSA was studied. Overtwisting and coiling resulted in approximately 70% strain in stiff TSAs and approximately 60% strain in compliant TSAs. This is more than twice the strain achieved through regular twisting. Lastly, the overtwisted TSA was successfully demonstrated in a robotic bicep.