Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeORRB -- OpenAI Remote Rendering Backend
Paper and Code
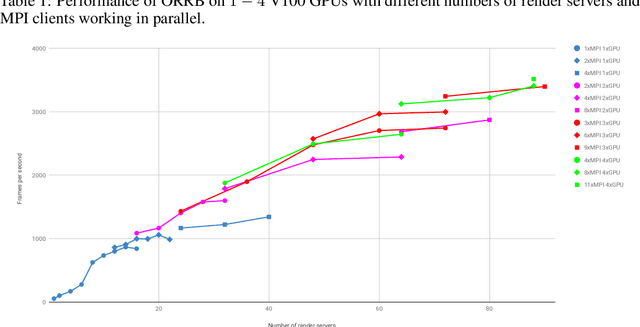
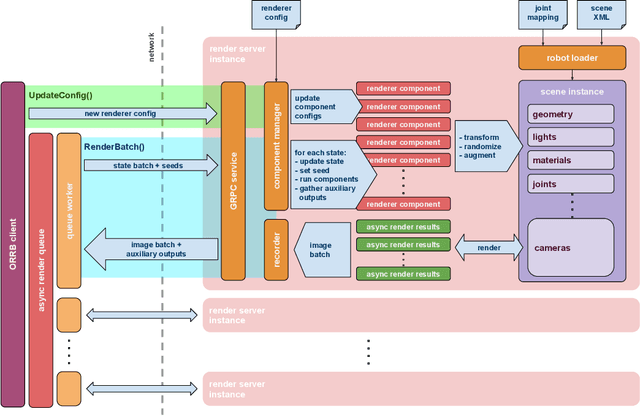
We present the OpenAI Remote Rendering Backend (ORRB), a system that allows fast and customizable rendering of robotics environments. It is based on the Unity3d game engine and interfaces with the MuJoCo physics simulation library. ORRB was designed with visual domain randomization in mind. It is optimized for cloud deployment and high throughput operation. We are releasing it to the public under a liberal MIT license: https://github.com/openai/orrb .
View paper on