 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing an Adaptive Fuzzy Logic Controller of a 3-DOF Helicopter with a Modified PSO Algorithm
Paper and Code
May 01, 2022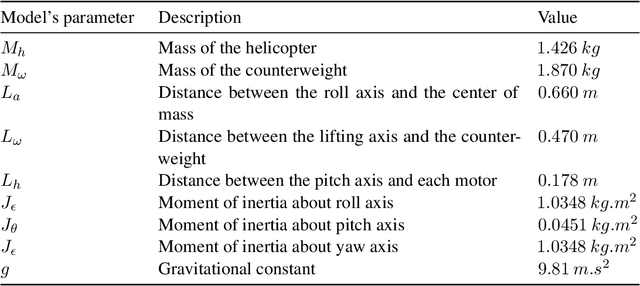
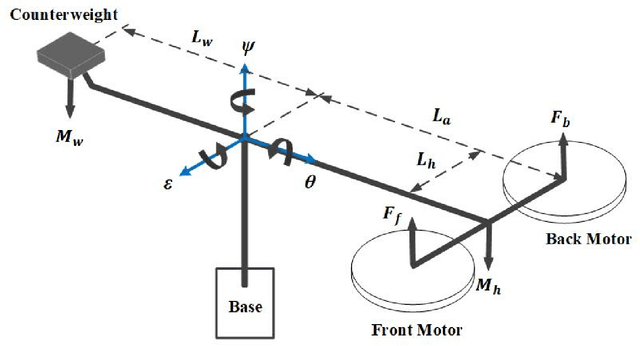
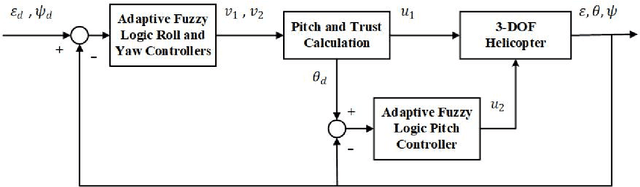
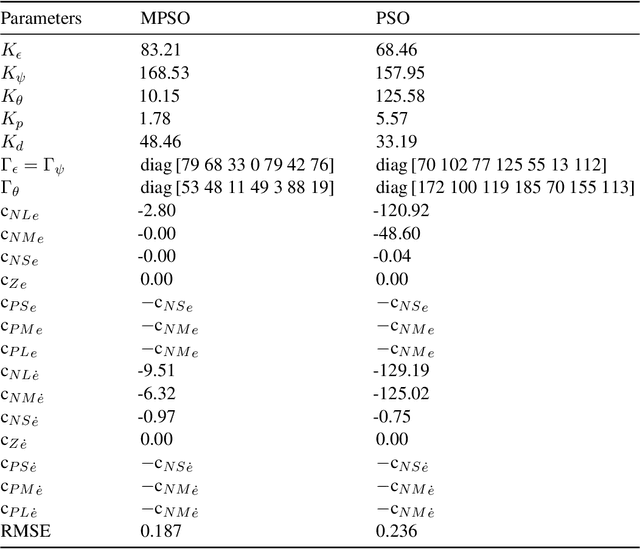
This paper investigates the controller optimization for a helicopter system with three degrees of freedom (3-DOF). To control the system, we combined fuzzy logic with adaptive control theory. The system is extensively nonlinear and highly sensitive to the controller's parameters, making it a real challenge to study these parameters' effect on the controller's performance. Using metaheuristic algorithms for determining these parameters is a promising solution. This paper proposes using a modified particle swarm optimization (MPSO) algorithm to optimize the controller. The algorithm shows a high ability to perform the global search and find a reasonable search space. The algorithm modifies the search space of each particle based on its fitness function value and substitutes weak particles for new ones. These modifications have led to better accuracy and convergence rate. We prove the efficiency of the MPSO algorithm by comparing it with the standard PSO and six other well-known metaheuristic algorithms when optimizing the adaptive fuzzy logic controller of the 3-DOF helicopter. The proposed method's effectiveness is shown through computer simulations while the system is subject to uncertainties and disturbance. We demonstrate the method's superiority by comparing the results when the MPSO and the standard PSO optimize the controller.