Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Needle Diameter, Shape, and Path in Autonomous Suturing
Paper and Code
Jan 14, 2019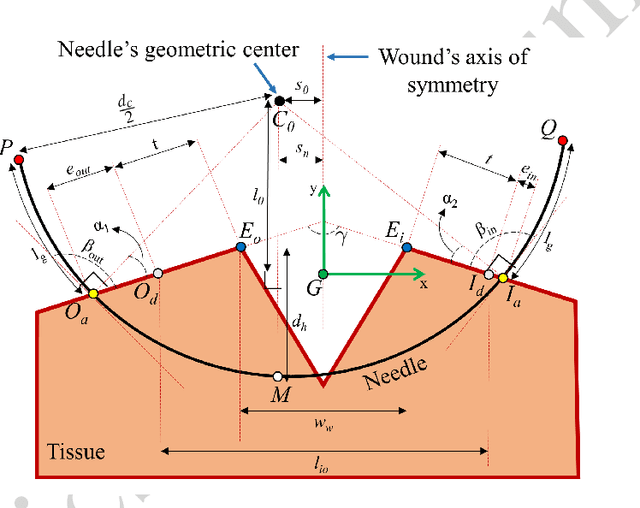
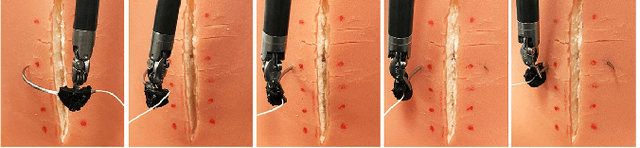
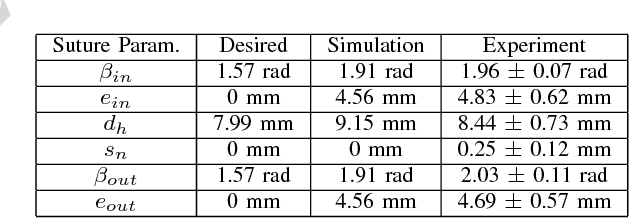
Needle shape, diameter, and path are critical parameters that directly affect suture depth and tissue trauma in autonomous suturing. This paper presents an optimization-based approach to specify these parameters. Given clinical suturing guidelines, a kinematic model of needle-tissue interaction was developed to quantify suture parameters and constraints. The model was further used to formulate constant curvature needle path planning as a nonlinear optimization problem. The optimization results were confirmed experimentally with the Raven II surgical system. The proposed needle path planning algorithm guarantees minimal tissue trauma and complies with a wide range of suturing requirements.
* 2 pages, 2 figures, 2017 SoCal Robotics Symposium
View paper on