 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Performance of Pilot-Aided Simultaneous Communication and Tracking
Paper and Code
Oct 09, 2024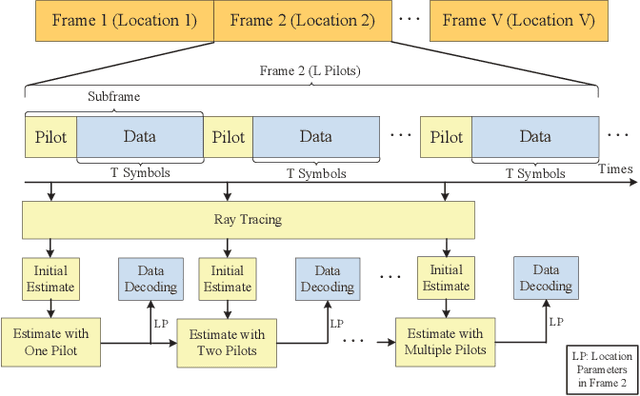
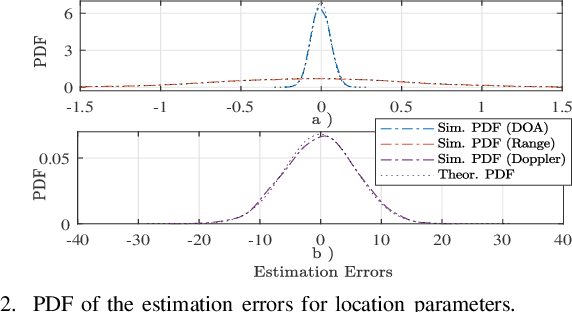
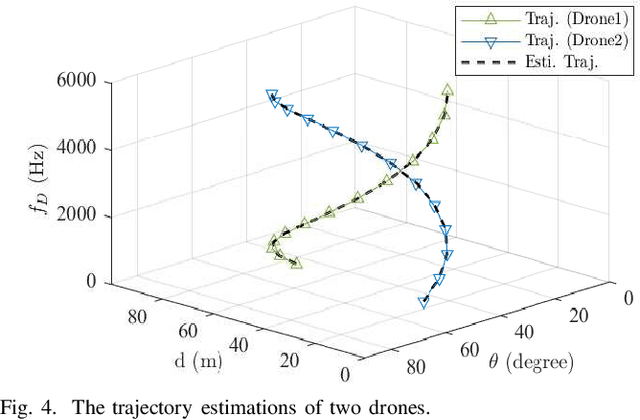
In this paper, the symbol error rate performance analysis is provided for a pilot-aided simultaneous communication and tracking (PASCAT) system. In specific, we employ multiple drones to actively transmit signals to a BS, which is responsible for continuously monitoring the location of drones over time and decoding the symbols transmitted from the drones. It is found that the estimated location parameters at a given moment during tracking follow Gaussian distributions with means equal to actual values and variances equal to root mean square error (RMSE). Afterwards, the obtained location information is employed for informing the channel information, which is then used to preprocess the received signal before decoding by using the maximum ratio combining (MRC) technique. The average symbol error rate (SER) is also evaluated over the distribution of the estimated location parameters and an approximate value for the average SER is obtained by using a Taylor approximation with fast convergence. The result indicates that there is a cooperation relationship between the RMSE of the estimated location parameters and the average SER. In addition, the effect of the number of pilot signals is analysed as well. By employing more pilots, it is found that both communication and sensing functionalities are enhanced. Furthermore, the SER performance of our PASCAT system is similar to that of maximum likelihood detection (MLD) when a number of pilot signals are employed, which demonstrates the efficiency of the PASCAT system. In the end, all results are validated by using Monte Carlo simulations.