 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Planning with Preferences in HTN
Paper and Code
Sep 03, 2009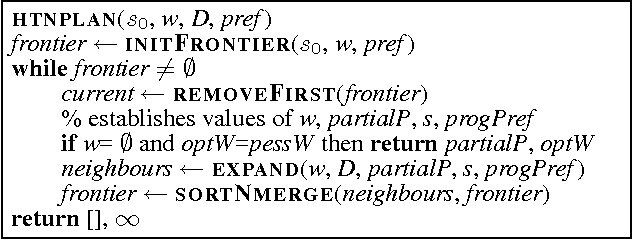
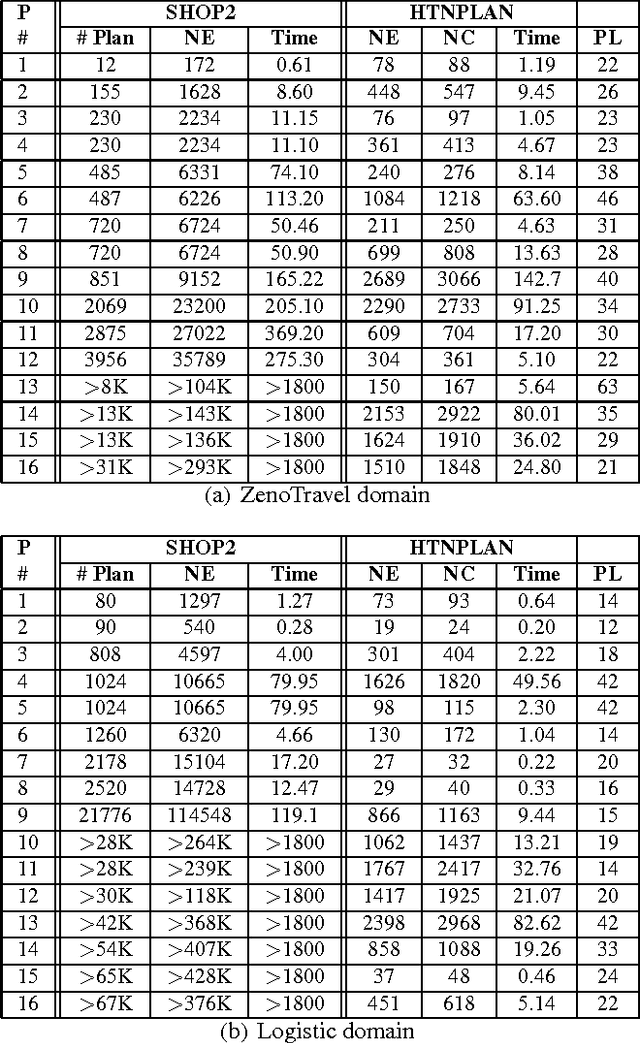
In this paper, we address the problem of generating preferred plans by combining the procedural control knowledge specified by Hierarchical Task Networks (HTNs) with rich qualitative user preferences. The outcome of our work is a language for specifyin user preferences, tailored to HTN planning, together with a provably optimal preference-based planner, HTNPLAN, that is implemented as an extension of SHOP2. To compute preferred plans, we propose an approach based on forward-chaining heuristic search. Our heuristic uses an admissible evaluation function measuring the satisfaction of preferences over partial plans. Our empirical evaluation demonstrates the effectiveness of our HTNPLAN heuristics. We prove our approach sound and optimal with respect to the plans it generates by appealing to a situation calculus semantics of our preference language and of HTN planning. While our implementation builds on SHOP2, the language and techniques proposed here are relevant to a broad range of HTN planners.