 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Deep Learning for Geometric and Semantic Scene Understanding Using On-Vehicle 3D LiDAR
Paper and Code
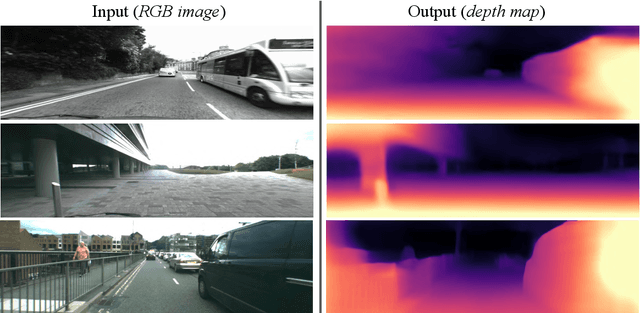


3D LiDAR point cloud data is crucial for scene perception in computer vision, robotics, and autonomous driving. Geometric and semantic scene understanding, involving 3D point clouds, is essential for advancing autonomous driving technologies. However, significant challenges remain, particularly in improving the overall accuracy (e.g., segmentation accuracy, depth estimation accuracy, etc.) and efficiency of these systems. To address the challenge in terms of accuracy related to LiDAR-based tasks, we present DurLAR, the first high-fidelity 128-channel 3D LiDAR dataset featuring panoramic ambient (near infrared) and reflectivity imagery. To improve efficiency in 3D segmentation while ensuring the accuracy, we propose a novel pipeline that employs a smaller architecture, requiring fewer ground-truth annotations while achieving superior segmentation accuracy compared to contemporary approaches. To improve the segmentation accuracy, we introduce Range-Aware Pointwise Distance Distribution (RAPiD) features and the associated RAPiD-Seg architecture. All contributions have been accepted by peer-reviewed conferences, underscoring the advancements in both accuracy and efficiency in 3D LiDAR applications for autonomous driving. Full abstract: https://etheses.dur.ac.uk/15738/.