Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObservability Analysis of Visual-Inertial Odometry with Online Calibration of Velocity-Control Based Kinematic Motion Models
Paper and Code
Apr 13, 2022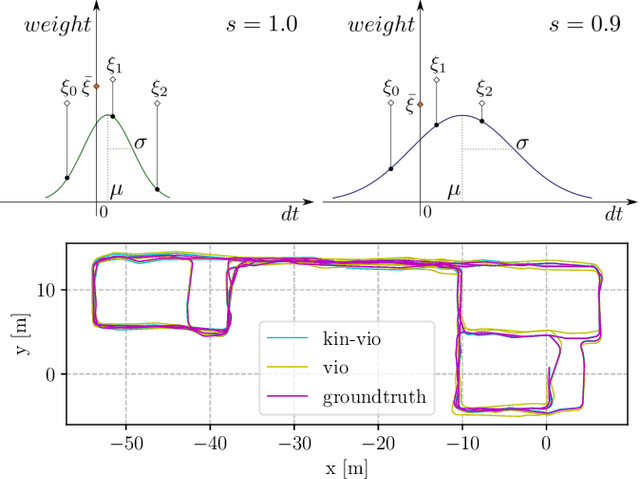
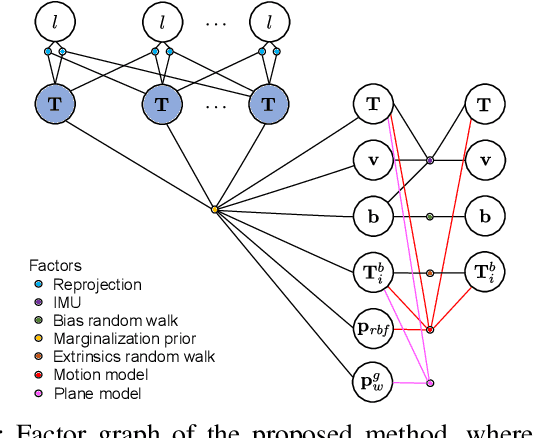
In this paper, we analyze the observability of the visual-inertial odometry (VIO) using stereo cameras with a velocity-control based kinematic motion model. Previous work shows that in general case the global position and yaw are unobservable in VIO system, additionally the roll and pitch become also unobservable if there is no rotation. We prove that by integrating a planar motion constraint roll and pitch become observable. We also show that the parameters of the motion model are observable.
View paper on