 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObject Detection Using Keygraphs
Paper and Code
Oct 01, 2013


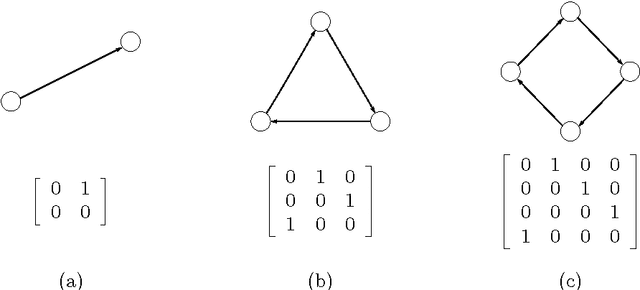
We propose a new framework for object detection based on a generalization of the keypoint correspondence framework. This framework is based on replacing keypoints by keygraphs, i.e. isomorph directed graphs whose vertices are keypoints, in order to explore relative and structural information. Unlike similar works in the literature, we deal directly with graphs in the entire pipeline: we search for graph correspondences instead of searching for individual point correspondences and then building graph correspondences from them afterwards. We also estimate the pose from graph correspondences instead of falling back to point correspondences through a voting table. The contributions of this paper are the proposed framework and an implementation that properly handles its inherent issues of loss of locality and combinatorial explosion, showing its viability for real-time applications. In particular, we introduce the novel concept of keytuples to solve a running time issue. The accuracy of the implementation is shown by results of over 800 experiments with a well-known database of images. The speed is illustrated by real-time tracking with two different cameras in ordinary hardware.