 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNoise-Stable Rigid Graphs for Euclidean Embedding
Paper and Code
Aug 06, 2019
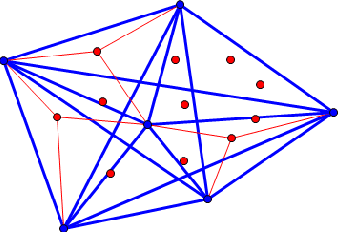
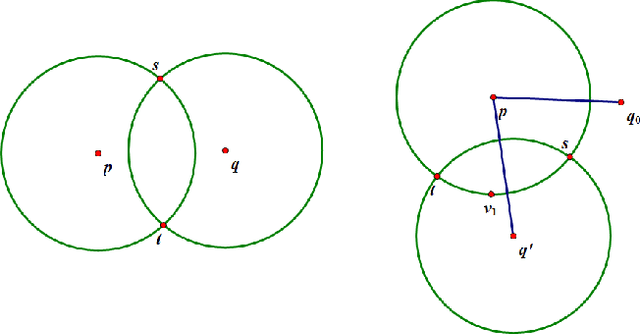
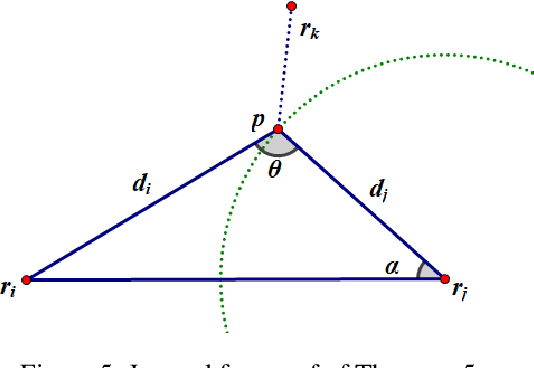
We proposed a new criterion \textit{noise-stability}, which revised the classical rigidity theory, for evaluation of MDS algorithms which can truthfully represent the fidelity of global structure reconstruction; then we proved the noise-stability of the cMDS algorithm in generic conditions, which provides a rigorous theoretical guarantee for the precision and theoretical bounds for Euclidean embedding and its application in fields including wireless sensor network localization and satellite positioning. Furthermore, we looked into previous work about minimum-cost globally rigid spanning subgraph, and proposed an algorithm to construct a minimum-cost noise-stable spanning graph in the Euclidean space, which enabled reliable localization on sparse graphs of noisy distance constraints with linear numbers of edges and sublinear costs in total edge lengths. Additionally, this algorithm also suggests a scheme to reconstruct point clouds from pairwise distances at a minimum of $O(n)$ time complexity, down from $O(n^3)$ for cMDS.