Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNimbRo Logistics -- Project KittingBot
Paper and Code
Jan 13, 2020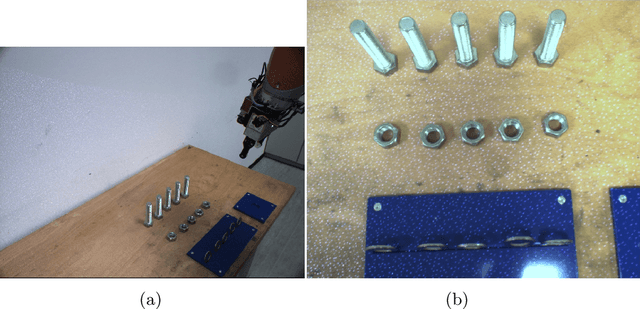
Recovering the pose of an object from mere point clouds is often hindered by the lack of the information that they provide. In this lab, we address this problem by proposing a method that exploits the symmetry of objects as well as using pictures taken from a static camera of the same scene. We apply this approach to detects nuts in a table top scene that includes screws, nuts, washers and several placeholders for grasp planning.
View paper on