 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNetworked Drones for Industrial Emergency Events
Paper and Code
Aug 01, 2022
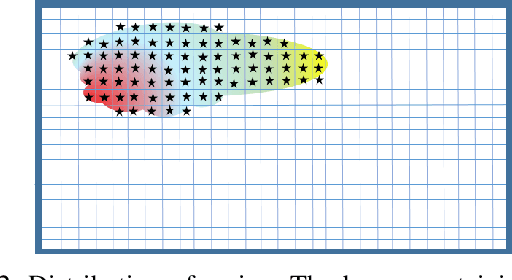
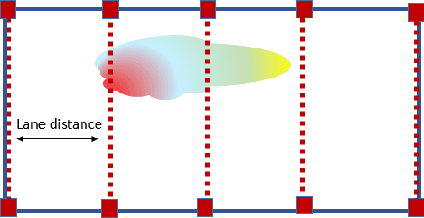
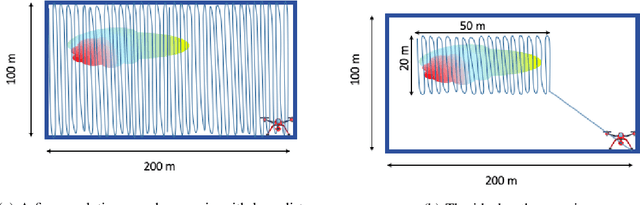
Uncontrolled emissions of gases from industrial accidents and disasters result in huge loss of life and property. Such extreme events require a quick and reliable survey of the site for effective rescue strategy planning. To achieve these goals, a network of unmanned aerial vehicles can be deployed that survey the affected region and identify safe and danger zones. Although single UAV-based systems for gas sensing applications are well-studied in literature, research on the deployment of a UAV network for such applications, which is more robust and fault tolerant, is still in infancy. The objective of this project is to design a system that can be deployed in emergency situations to provide a quick survey and identification of safe and dangerous zones in a given region that contains a toxic plume without making any assumptions about plume location. We focus on an end-to-end solution and formulate a two-phase strategy that can not only guarantee detection/acquisition of plume but also its characterization with high spatial resolution. To guarantee coverage of the region with a certain spatial resolution, we set up a vehicle routing problem. To overcome the limitations imposed by limited range of sensors and drone resources, we estimate the concentration map by using Gaussian kernel extrapolation. Finally, we evaluate the suggested framework in simulations. Our results suggest that this two-phase strategy not only gives better error performance but is also more efficient in terms of mission time. Moreover, the comparison between 2-phase random search and 2-phase uniform coverage suggest that the latter is better for single drone systems whereas for multiple drones the former gives reasonable performance at low computational cost.