 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNearest Neighbor-based Rendezvous for Sparsely Connected Mobile Agents
Paper and Code
Jul 03, 2016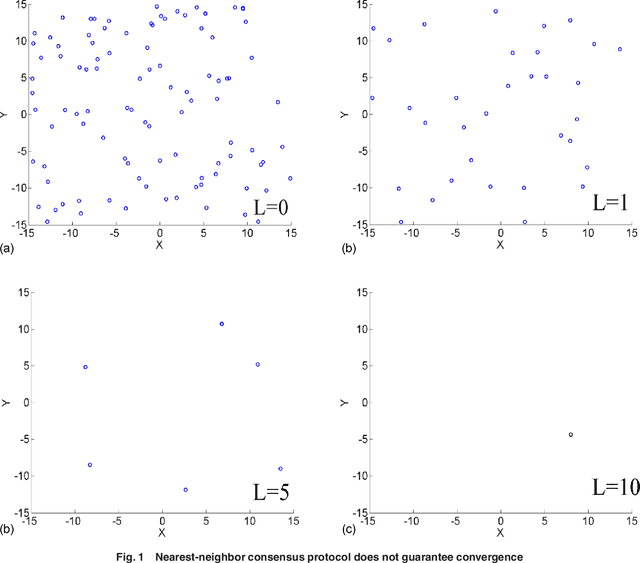
In this paper a convergent, nearest-neighbor, control protocol is suggested for agents with nontrivial dynamics. The protocol guarantees convergence to a common point in space even if each agent is restricted to communicate with a single nearest neighbor. The neighbor, however, is required to lie outside an arbitrarily small priority zone surrounding the agent. The control protocol consists of two layers interconnected in a provably-correct manner. The first layer provides the guidance signal to a rendezvous point assuming that the agents have first order dynamics. The other layer converts in a decentralized manner the guidance signal to a control signal that suits realistic agents such as UGVs, UAVs and holonomic agents with second order dynamics.