 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNavigating to Objects in Unseen Environments by Distance Prediction
Paper and Code
Feb 08, 2022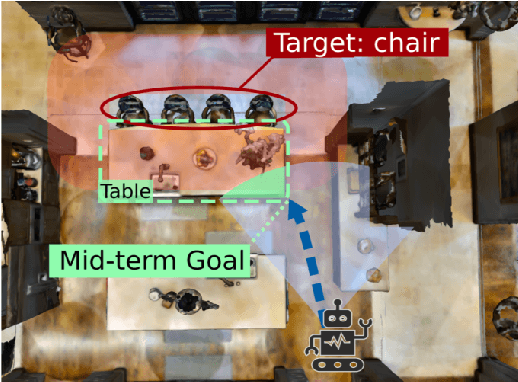
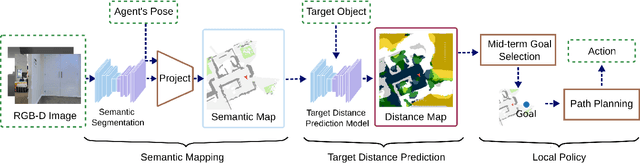
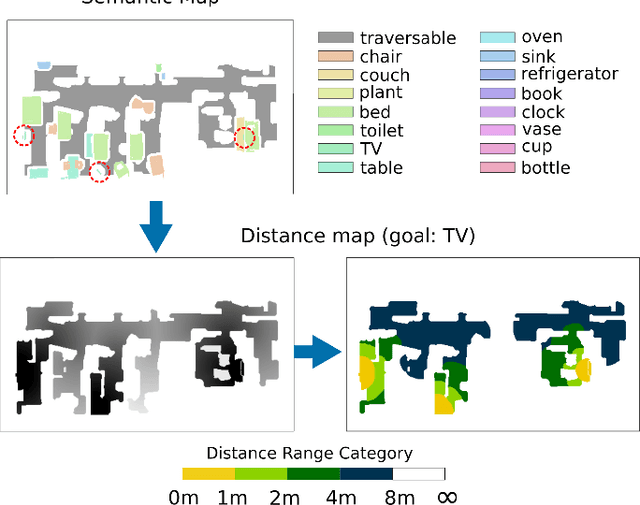
Object Goal Navigation (ObjectNav) task is to navigate an agent to an object instance in unseen environments. The traditional navigation paradigm plans the shortest path on a pre-built map. Inspired by this, we propose an object goal navigation framework, which could directly perform path planning based on an estimated distance map. Specifically, our model takes a birds-eye-view semantic map as input, and estimates the distance from the map cells to the target object based on the learned prior knowledge. With the estimated distance map, the agent could explore the environment and navigate to the target objects based on either human-designed or learned navigation policy. Empirical results in visually realistic simulation environments show that the proposed method outperforms a wide range of baselines on success rate and efficiency.