 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMutual-Learning Knowledge Distillation for Nighttime UAV Tracking
Paper and Code
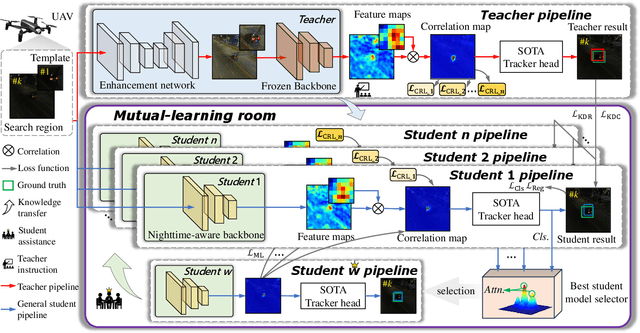
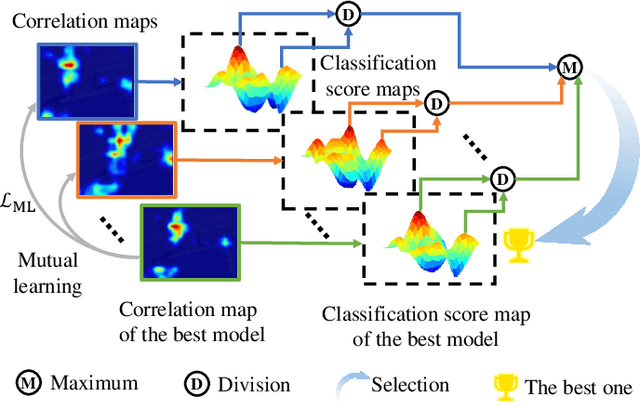
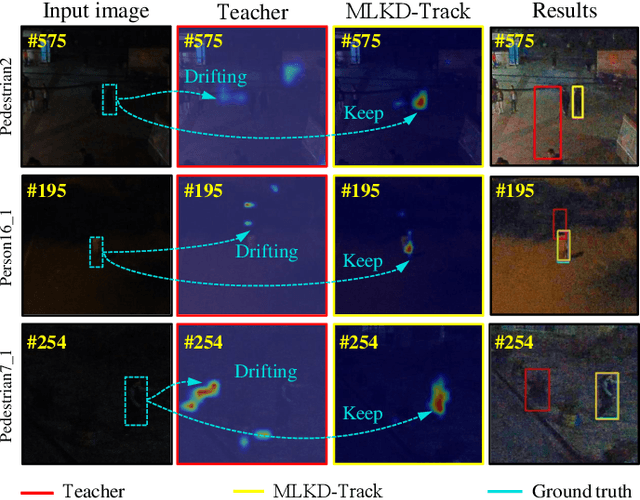
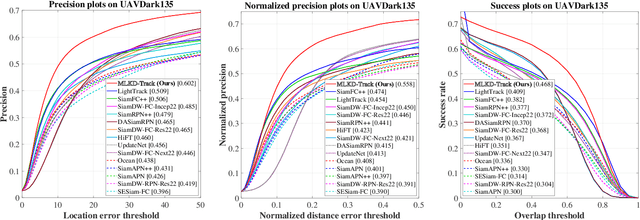
Nighttime unmanned aerial vehicle (UAV) tracking has been facilitated with indispensable plug-and-play low-light enhancers. However, the introduction of low-light enhancers increases the extra computational burden for the UAV, significantly hindering the development of real-time UAV applications. Meanwhile, these state-of-the-art (SOTA) enhancers lack tight coupling with the advanced daytime UAV tracking approach. To solve the above issues, this work proposes a novel mutual-learning knowledge distillation framework for nighttime UAV tracking, i.e., MLKD. This framework is constructed to learn a compact and fast nighttime tracker via knowledge transferring from the teacher and knowledge sharing among various students. Specifically, an advanced teacher based on a SOTA enhancer and a superior tracking backbone is adopted for guiding the student based only on the tight coupling-aware tracking backbone to directly extract nighttime object features. To address the biased learning of a single student, diverse lightweight students with different distillation methods are constructed to focus on various aspects of the teacher's knowledge. Moreover, an innovative mutual-learning room is designed to elect the superior student candidate to assist the remaining students frame-by-frame in the training phase. Furthermore, the final best student, i.e., MLKD-Track, is selected through the testing dataset. Extensive experiments demonstrate the effectiveness and superiority of MLKD and MLKD-Track. The practicality of the MLKD-Track is verified in real-world tests with different challenging situations. The code is available at https://github.com/lyfeng001/MLKD.