 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-sensor data fusion based on a generalised belief divergence measure
Paper and Code
Jun 05, 2018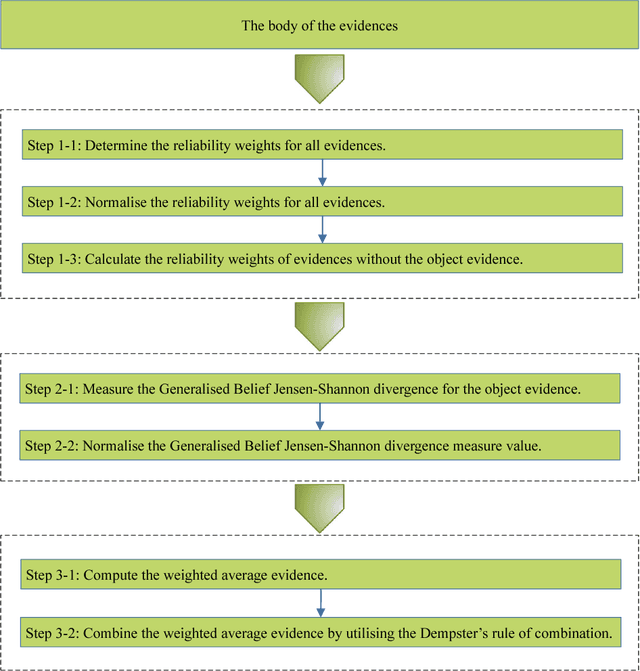



Multi-sensor data fusion technology plays an important role in real applications. Because of the flexibility and effectiveness in modelling and processing the uncertain information regardless of prior probabilities, Dempster-Shafer evidence theory is widely applied in a variety of fields of information fusion. However, counter-intuitive results may come out when fusing the highly conflicting evidences. In order to deal with this problem, a novel method for multi-sensor data fusion based on a new generalised belief divergence measure of evidences is proposed. Firstly, the reliability weights of evidences are determined by considering the sufficiency and importance of the evidences. After that, on account of the reliability weights of evidences, a new Generalised Belief Jensen-Shannon divergence (GBJS) is designed to measure the discrepancy and conflict degree among multiple evidences, which can be utilised to measure the support degrees of evidences. Afterwards, the support degrees of evidences are used to adjust the bodies of the evidences before using the Dempster's combination rule. Finally, an application in fault diagnosis demonstrates the validity of the proposed method.