 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion Robust High-Speed Light-weighted Object Detection with Event Camera
Paper and Code

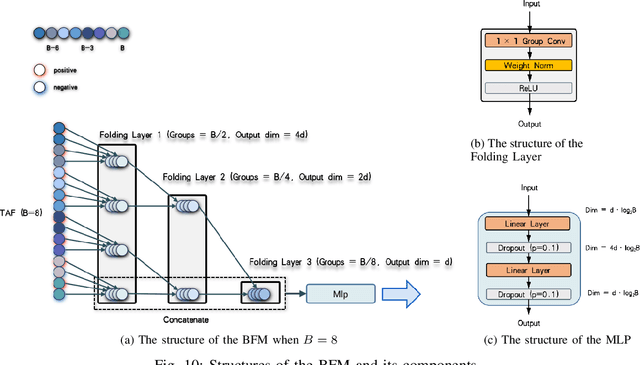

The event camera produces a large dynamic range event stream with a very high temporal resolution discarding redundant visual information, thus bringing new possibilities for object detection tasks. However, the existing methods of applying the event camera to object detection tasks using deep learning methods still have many problems. First, existing methods cannot take into account objects with different velocities relative to the motion of the event camera due to the global synchronized time window and temporal resolution. Second, most of the existing methods rely on large parameter neural networks, which implies a large computational burden and low inference speed, thus contrary to the high temporal resolution of the event stream. In our work, we design a high-speed lightweight detector called Agile Event Detector (AED) with a simple but effective data augmentation method. Also, we propose an event stream representation tensor called Temporal Active Focus (TAF), which takes full advantage of the asynchronous generation of event stream data and is robust to the motion of moving objects. It can also be constructed without much time-consuming. We further propose a module called the Bifurcated Folding Module (BFM) to extract the rich temporal information in the TAF tensor at the input layer of the AED detector. We conduct our experiments on two typical real-scene event camera object detection datasets: the complete Prophesee GEN1 Automotive Detection Dataset and the Prophesee 1 MEGAPIXEL Automotive Detection Dataset with partial annotation. Experiments show that our method is competitive in terms of accuracy, speed, and the number of parameters simultaneously. Also by classifying the objects into multiple motion levels based on the optical flow density metric, we illustrated the robustness of our method for objects with different velocities relative to the camera.