Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion Control of Interactive Robotic Arms Based on Mixed Reality Development
Paper and Code
Jan 03, 2024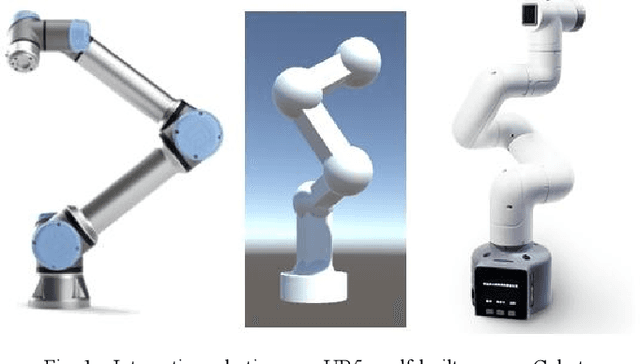
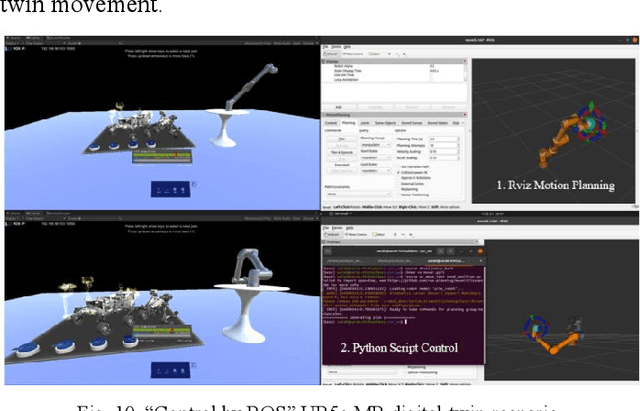
Mixed Reality (MR) is constantly evolving to inspire new patterns of robot manipulation for more advanced Human- Robot Interaction under the 4th Industrial Revolution Paradigm. Consider that Mixed Reality aims to connect physical and digital worlds to provide special immersive experiences, it is necessary to establish the information exchange platform and robot control systems within the developed MR scenarios. In this work, we mainly present multiple effective motion control methods applied on different interactive robotic arms (e.g., UR5, UR5e, myCobot) for the Unity-based development of MR applications, including GUI control panel, text input control panel, end-effector object dynamic tracking and ROS-Unity digital-twin connection.
* The full paper has been accepted by CompAuto 2023 with an online Oral
Presentation. (http://www.icca.net/, The 3rd International Conference on
Computers and Automation, December 7-9, 2023, Paris France)
View paper on