 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaterial Recognition CNNs and Hierarchical Planning for Biped Robot Locomotion on Slippery Terrain
Paper and Code
Jun 27, 2017
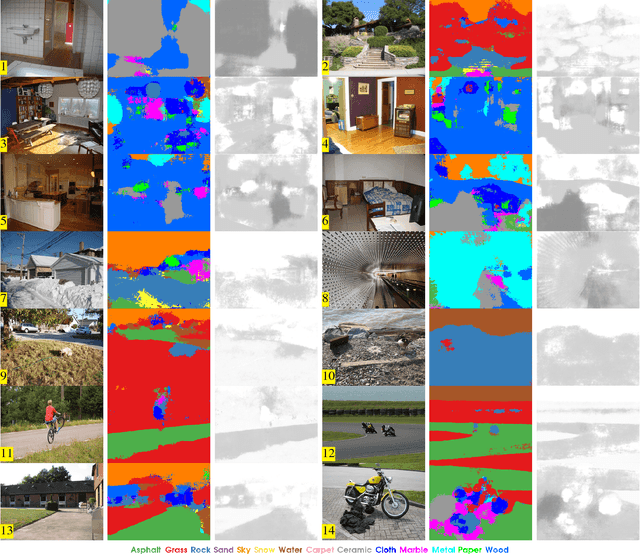

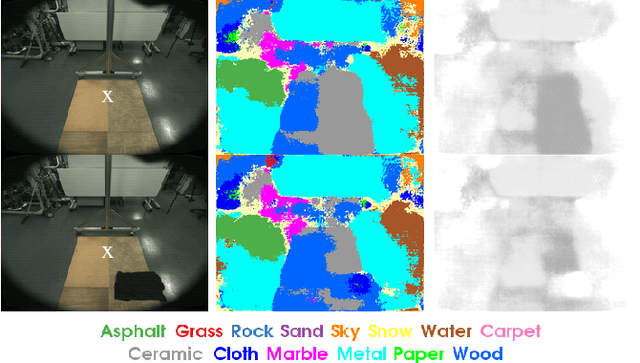
In this paper we tackle the problem of visually predicting surface friction for environments with diverse surfaces, and integrating this knowledge into biped robot locomotion planning. The problem is essential for autonomous robot locomotion since diverse surfaces with varying friction abound in the real world, from wood to ceramic tiles, grass or ice, which may cause difficulties or huge energy costs for robot locomotion if not considered. We propose to estimate friction and its uncertainty from visual estimation of material classes using convolutional neural networks, together with probability distribution functions of friction associated with each material. We then robustly integrate the friction predictions into a hierarchical (footstep and full-body) planning method using chance constraints, and optimize the same trajectory costs at both levels of the planning method for consistency. Our solution achieves fully autonomous perception and locomotion on slippery terrain, which considers not only friction and its uncertainty, but also collision, stability and trajectory cost. We show promising friction prediction results in real pictures of outdoor scenarios, and planning experiments on a real robot facing surfaces with different friction.