 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLoCUS: A multi-robot loss-tolerant algorithm for surveying volcanic plumes
Paper and Code
Sep 01, 2020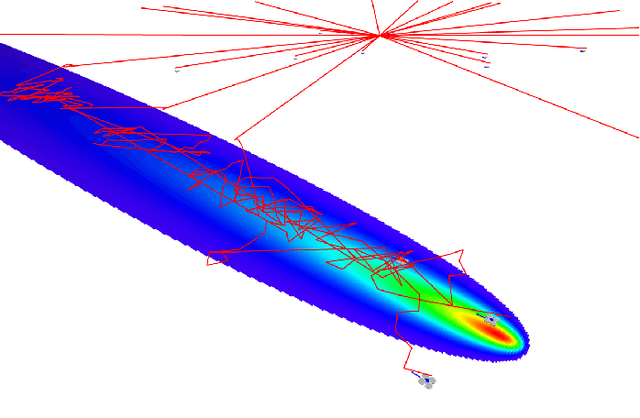
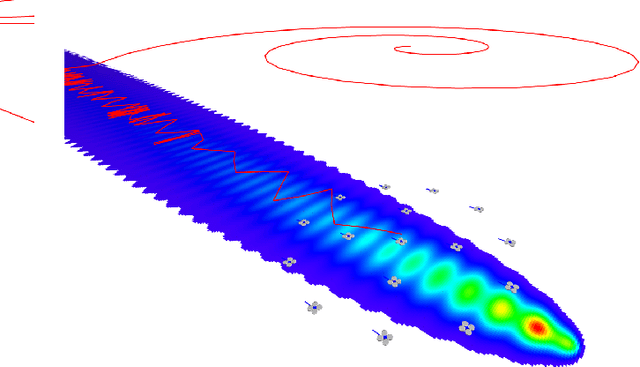
Measurement of volcanic CO2 flux by a drone swarm poses special challenges. Drones must be able to follow gas concentration gradients while tolerating frequent drone loss. We present the LoCUS algorithm as a solution to this problem and prove its robustness. LoCUS relies on swarm coordination and self-healing to solve the task. As a point of contrast we also implement the MoBS algorithm, derived from previously published work, which allows drones to solve the task independently. We compare the effectiveness of these algorithms using drone simulations, and find that LoCUS provides a reliable and efficient solution to the volcano survey problem. Further, the novel data-structures and algorithms underpinning LoCUS have application in other areas of fault-tolerant algorithm research.