 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging a realistic synthetic database to learn Shape-from-Shading for estimating the colon depth in colonoscopy images
Paper and Code
Nov 08, 2023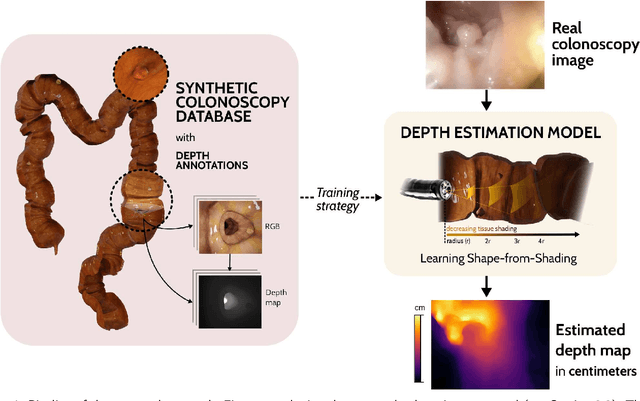
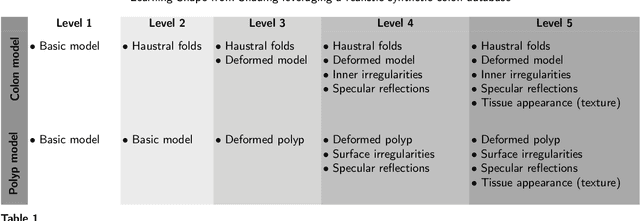
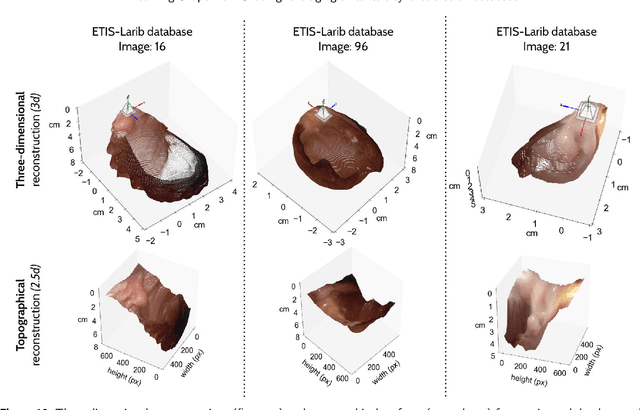
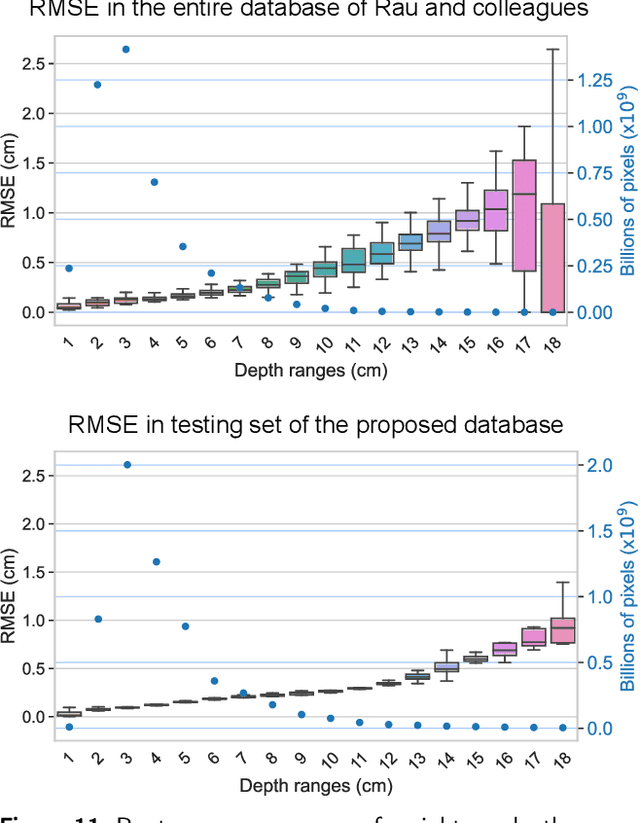
Colonoscopy is the choice procedure to diagnose colon and rectum cancer, from early detection of small precancerous lesions (polyps), to confirmation of malign masses. However, the high variability of the organ appearance and the complex shape of both the colon wall and structures of interest make this exploration difficult. Learned visuospatial and perceptual abilities mitigate technical limitations in clinical practice by proper estimation of the intestinal depth. This work introduces a novel methodology to estimate colon depth maps in single frames from monocular colonoscopy videos. The generated depth map is inferred from the shading variation of the colon wall with respect to the light source, as learned from a realistic synthetic database. Briefly, a classic convolutional neural network architecture is trained from scratch to estimate the depth map, improving sharp depth estimations in haustral folds and polyps by a custom loss function that minimizes the estimation error in edges and curvatures. The network was trained by a custom synthetic colonoscopy database herein constructed and released, composed of 248,400 frames (47 videos), with depth annotations at the level of pixels. This collection comprehends 5 subsets of videos with progressively higher levels of visual complexity. Evaluation of the depth estimation with the synthetic database reached a threshold accuracy of 95.65%, and a mean-RMSE of 0.451 cm, while a qualitative assessment with a real database showed consistent depth estimations, visually evaluated by the expert gastroenterologist coauthoring this paper. Finally, the method achieved competitive performance with respect to another state-of-the-art method using a public synthetic database and comparable results in a set of images with other five state-of-the-art methods.