Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to gesticulate by observation using a deep generative approach
Paper and Code
Sep 04, 2019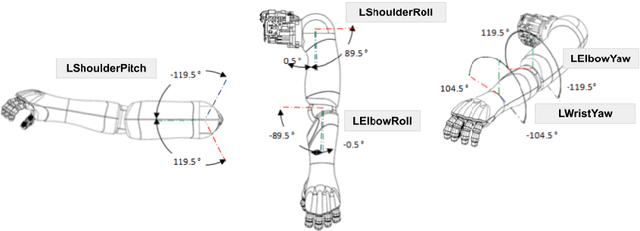
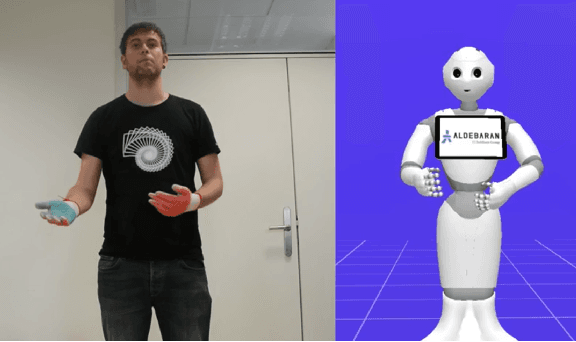
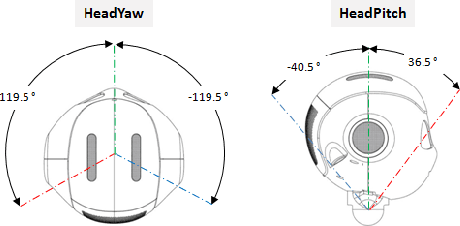
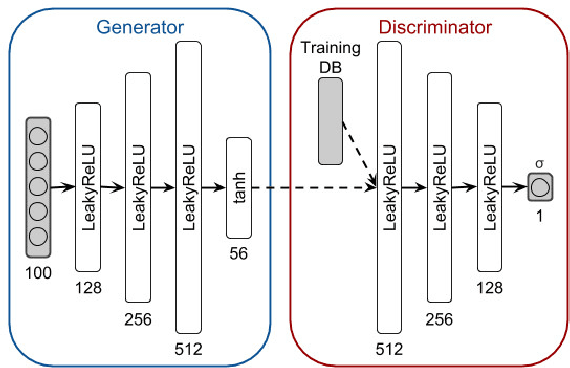
The goal of the system presented in this paper is to develop a natural talking gesture generation behavior for a humanoid robot, by feeding a Generative Adversarial Network (GAN) with human talking gestures recorded by a Kinect. A direct kinematic approach is used to translate from human poses to robot joint positions. The provided videos show that the robot is able to use a wide variety of gestures, offering a non-dreary, natural expression level.
* ICSR-2019 (accepted)
View paper on