 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning the Solution Manifold in Optimization and Its Application in Motion Planning
Paper and Code
Jul 24, 2020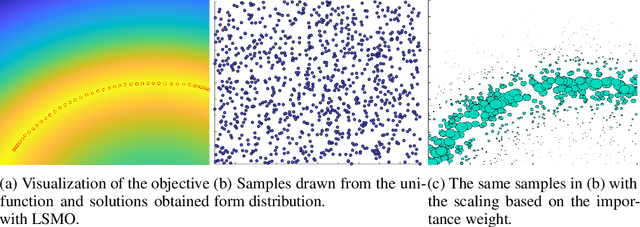


Optimization is an essential component for solving problems in wide-ranging fields. Ideally, the objective function should be designed such that the solution is unique and the optimization problem can be solved stably. However, the objective function used in a practical application is usually non-convex, and sometimes it even has an infinite set of solutions. To address this issue, we propose to learn the solution manifold in optimization. We train a model conditioned on the latent variable such that the model represents an infinite set of solutions. In our framework, we reduce this problem to density estimation by using importance sampling, and the latent representation of the solutions is learned by maximizing the variational lower bound. We apply the proposed algorithm to motion-planning problems, which involve the optimization of high-dimensional parameters. The experimental results indicate that the solution manifold can be learned with the proposed algorithm, and the trained model represents an infinite set of homotopic solutions for motion-planning problems.