 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKnowledge-Based Sequential Decision-Making Under Uncertainty
Paper and Code
May 16, 2019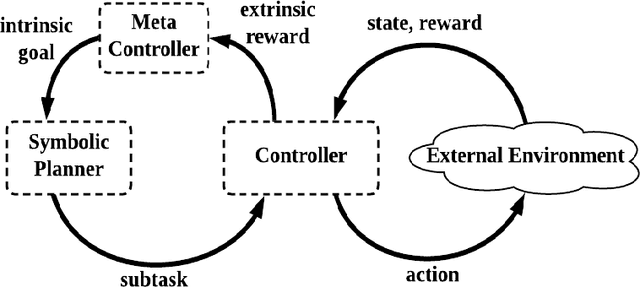
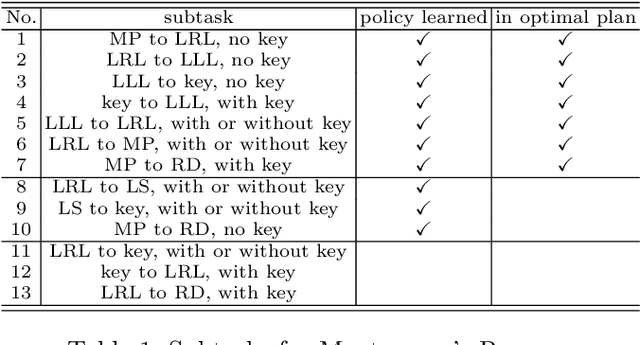

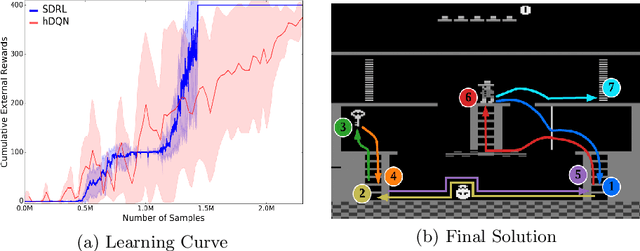
Deep reinforcement learning (DRL) algorithms have achieved great success on sequential decision-making problems, yet is criticized for the lack of data-efficiency and explainability. Especially, explainability of subtasks is critical in hierarchical decision-making since it enhances the transparency of black-box-style DRL methods and helps the RL practitioners to understand the high-level behavior of the system better. To improve the data-efficiency and explainability of DRL, declarative knowledge is introduced in this work and a novel algorithm is proposed by integrating DRL with symbolic planning. Experimental analysis on publicly available benchmarks validates the explainability of the subtasks and shows that our method can outperform the state-of-the-art approach in terms of data-efficiency.