 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInstance Segmentation and Object Detection with Bounding Shape Masks
Paper and Code
Oct 15, 2018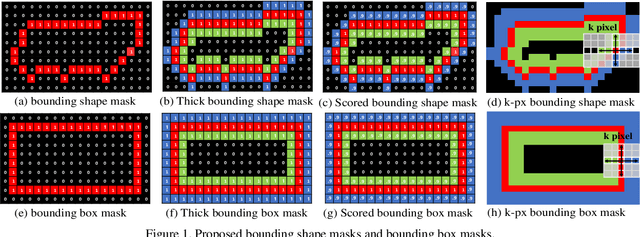


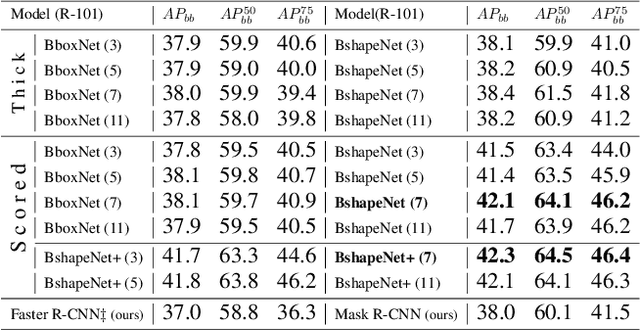
Many recent object detection algorithms use the bounding box regressor to predict the position coordinates of an object (i.e., to predict four continuous variables of an object's bounding box information). To improve object detection accuracy, we propose four types of object boundary segmentation masks that provide position information in a different manner than that done by object detection algorithms, Additionally, we investigated the effect of the proposed object bounding shape masks on instance segmentation. To evaluate the proposed masks, our method adds a proposed bounding shape (or box) mask to extend the Faster R-CNN framework; we call this Bounding Shape (or Box) Mask R-CNN. We experimentally verified its performance with two benchmark datasets, MS COCO and Cityscapes. The results indicate that our proposed models generally outperform Faster R-CNN and Mask R-CNN.