 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInfrastructure-less Wireless Connectivity for Mobile Robotic Systems in Logistics: Why Bluetooth Mesh Networking is Important?
Paper and Code
Jul 12, 2021
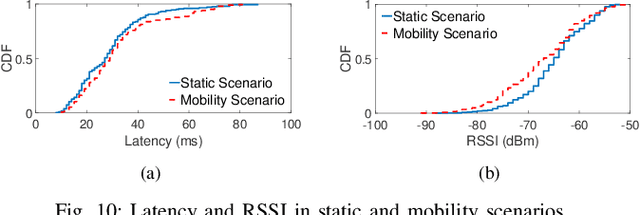
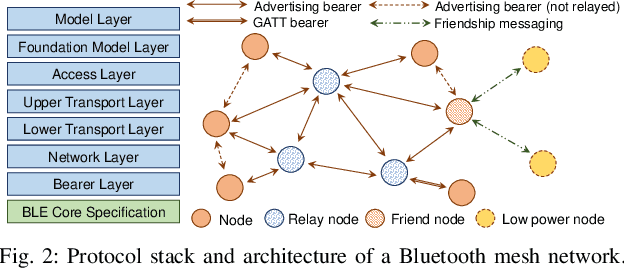

Mobile robots have disrupted the material handling industry which is witnessing radical changes. The requirement for enhanced automation across various industry segments often entails mobile robotic systems operating in logistics facilities with little/no infrastructure. In such environments, out-of-box low-cost robotic solutions are desirable. Wireless connectivity plays a crucial role in successful operation of such mobile robotic systems. A wireless mesh network of mobile robots is an attractive solution; however, a number of system-level challenges create unique and stringent service requirements. The focus of this paper is the role of Bluetooth mesh technology, which is the latest addition to the Internet-of-Things (IoT) connectivity landscape, in addressing the challenges of infrastructure-less connectivity for mobile robotic systems. It articulates the key system-level design challenges from communication, control, cooperation, coverage, security, and navigation/localization perspectives, and explores different capabilities of Bluetooth mesh technology for such challenges. It also provides performance insights through real-world experimental evaluation of Bluetooth mesh while investigating its differentiating features against competing solutions.