Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInformation Modeling for a Dynamic Representation of an Emergency Situation
Paper and Code
May 27, 2009

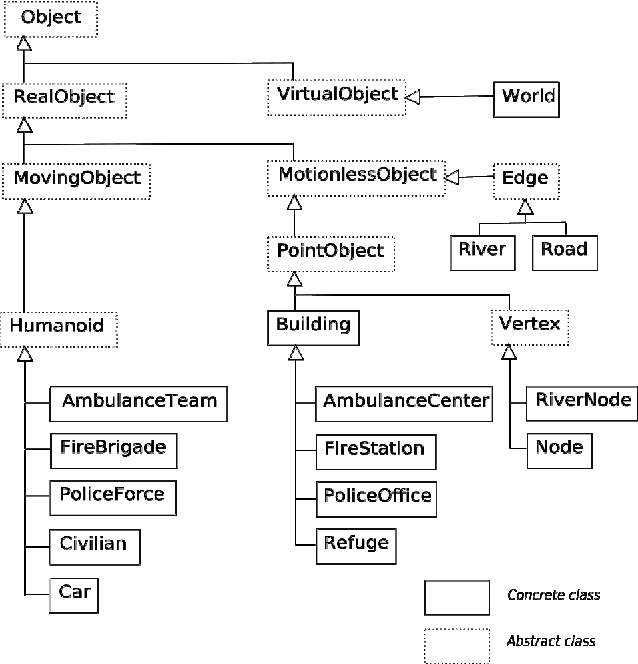

In this paper we propose an approach to build a decision support system that can help emergency planners and responders to detect and manage emergency situations. The internal mechanism of the system is independent from the treated application. Therefore, we think the system may be used or adapted easily to different case studies. We focus here on a first step in the decision-support process which concerns the modeling of information issued from the perceived environment and their representation dynamically using a multiagent system. This modeling was applied on the RoboCupRescue Simulation System. An implementation and some results are presented here.
* 6
View paper on