 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Human Performance Using Mixed Granularity of Control in Multi-Human Multi-Robot Interaction
Paper and Code
Sep 16, 2019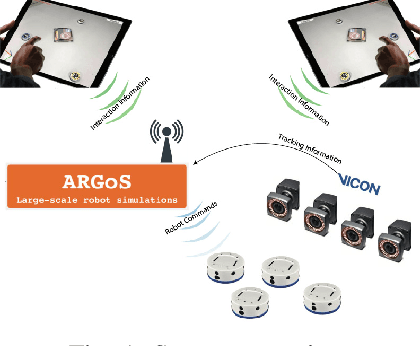
Due to the potentially large number of units involved, the interaction with a multi-robot system is likely to exceed the limits of the span of apprehension of any individual human operator. In previous work, we studied how this issue can be tackled by interacting with the robots in two modalities --- environment-oriented and robot-oriented. In this paper, we study how this concept can be applied to the case in which multiple human operators perform supervisory control on a multi-robot system. While the presence of extra operators suggests that more complex tasks could be accomplished, little research exists on how this could be achieved efficiently. In particular, one challenge arises --- the out-of-the-loop performance problem caused by a lack of engagement in the task, awareness of its state, and trust in the system and in the other operators. Through a user study involving 28 human operators and 8 real robots, we study how the concept of mixed granularity in multi-human multi-robot interaction affects user engagement, awareness, and trust while balancing the workload between multiple operators.