 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImpact-Resilient Orchestrated Robust Controller for Heavy-duty Hydraulic Manipulators
Paper and Code
Aug 17, 2024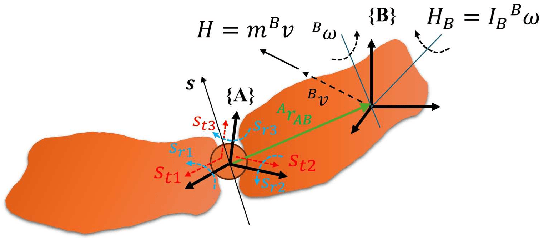
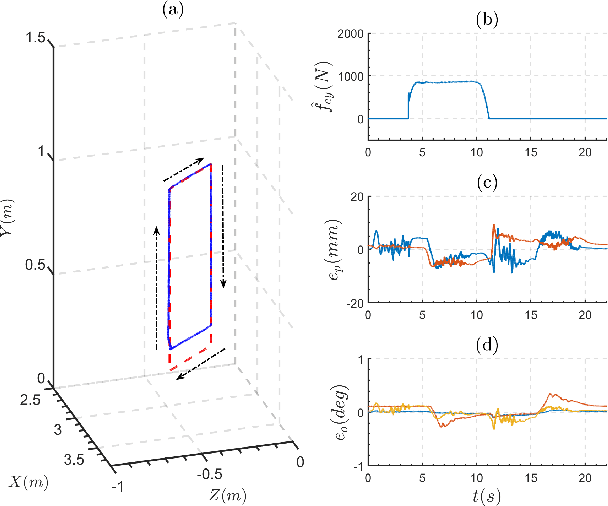
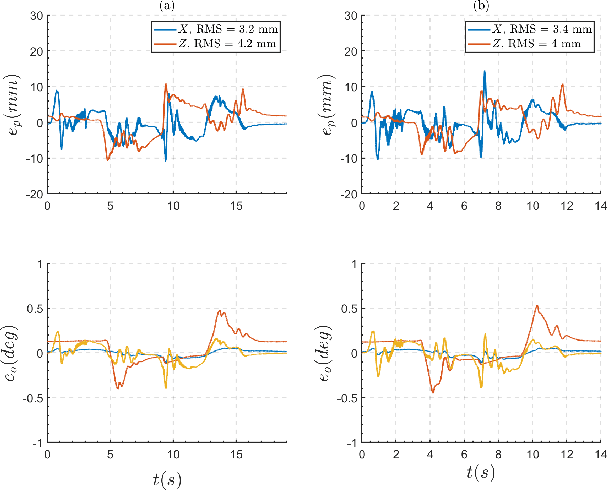
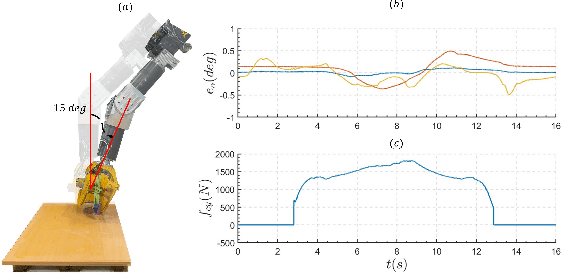
Heavy-duty operations, typically performed using heavy-duty hydraulic manipulators (HHMs), are susceptible to environmental contact due to tracking errors or sudden environmental changes. Therefore, beyond precise control design, it is crucial that the manipulator be resilient to potential impacts without relying on contact-force sensors, which mostly cannot be utilized. This paper proposes a novel force-sensorless robust impact-resilient controller for a generic 6-degree-of-freedom (DoF) HHM constituting from anthropomorphic arm and spherical wrist mechanisms. The scheme consists of a neuroadaptive subsystem-based impedance controller, which is designed to ensure both accurate tracking of position and orientation with stabilization of HHMs upon contact, along with a novel generalized momentum observer, which is for the first time introduced in Pl\"ucker coordinate, to estimate the impact force. Finally, by leveraging the concepts of virtual stability and virtual power flow, the semi-global uniformly ultimately boundedness of the entire system is assured. To demonstrate the efficacy and versatility of the proposed method, extensive experiments were conducted using a generic 6-DoF industrial HHM. The experimental results confirm the exceptional performance of the designed method by achieving a subcentimeter tracking accuracy and by 80% reduction of impact of the contact.