 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImage Moment Models for Extended Object Tracking
Paper and Code
Apr 09, 2018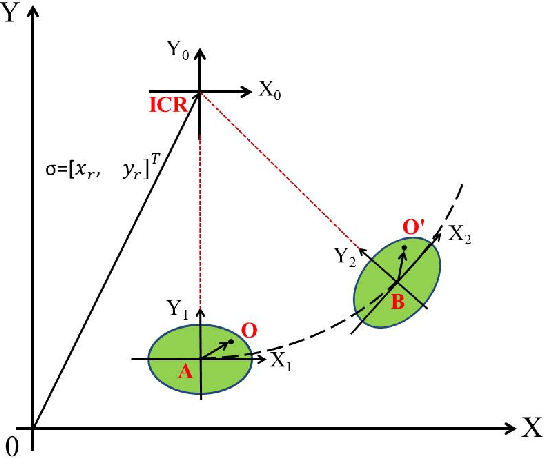

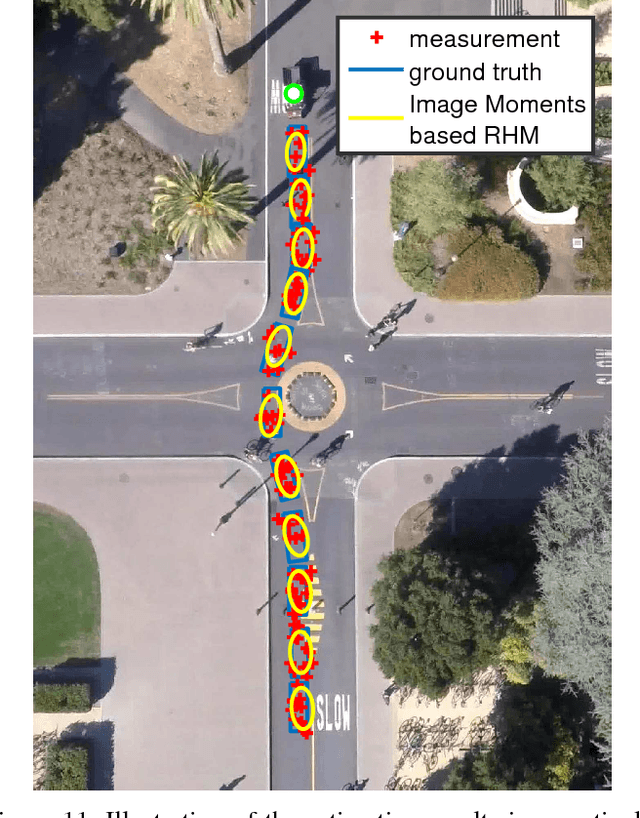
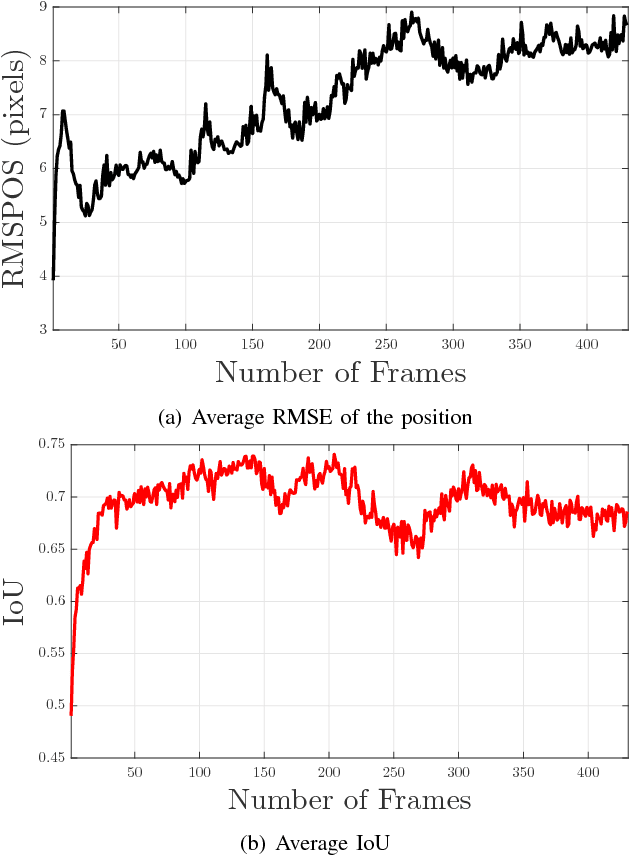
In this paper, a novel image moments based model for shape estimation and tracking of an object moving with a complex trajectory is presented. The camera is assumed to be stationary looking at a moving object. Point features inside the object are sampled as measurements. An ellipsoidal approximation of the shape is assumed as a primitive shape. The shape of an ellipse is estimated using a combination of image moments. Dynamic model of image moments when the object moves under the constant velocity or coordinated turn motion model is derived as a function for the shape estimation of the object. An Unscented Kalman Filter-Interacting Multiple Model (UKF-IMM) filter algorithm is applied to estimate the shape of the object (approximated as an ellipse) and track its position and velocity. A likelihood function based on average log-likelihood is derived for the IMM filter. Simulation results of the proposed UKF-IMM algorithm with the image moments based models are presented that show the estimations of the shape of the object moving in complex trajectories. Comparison results, using intersection over union (IOU), and position and velocity root mean square errors (RMSE) as metrics, with a benchmark algorithm from literature are presented. Results on real image data captured from the quadcopter are also presented.