Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIdentifying Vessel Branching from Fluid Stresses on Microscopic Robots
Paper and Code
Oct 17, 2018

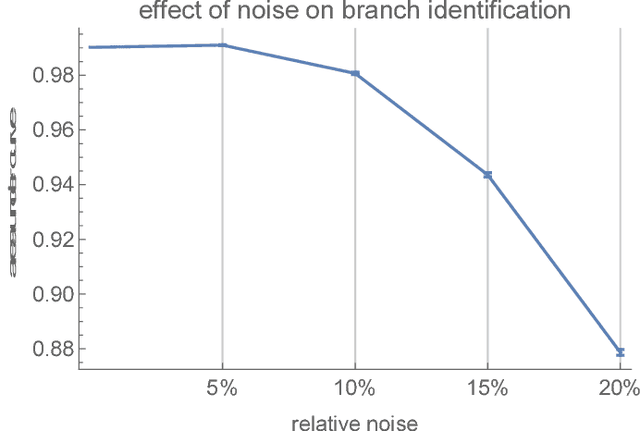

Objects moving in fluids experience patterns of stress on their surfaces determined by the geometry of nearby boundaries. Flows at low Reynolds number, as occur in microscopic vessels such as capillaries in biological tissues, have relatively simple relations between stresses and nearby vessel geometry. Using these relations, this paper shows how a microscopic robot moving with such flows can use changes in stress on its surface to identify when it encounters vessel branches.
View paper on