 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIdentifying the differences between 3 dimensional shapes Using a Custom-built Smart Glove
Paper and Code
Jan 08, 2022
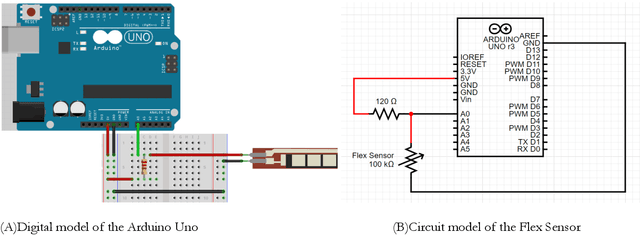

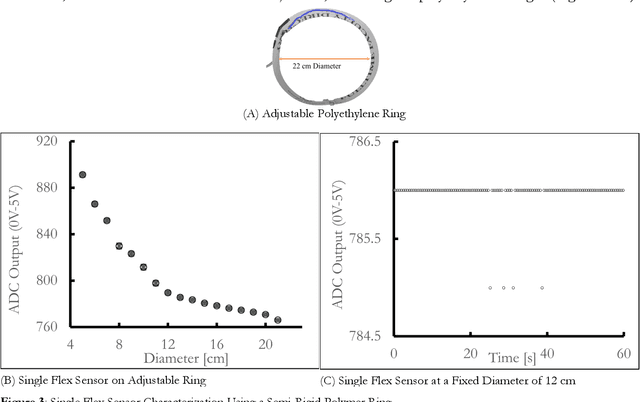
Sensor embedded glove systems have been reported to require careful, time consuming and precise calibrations on a per user basis in order to obtain consistent usable data. We have developed a low cost, flex sensor based smart glove system that may be resilient to the common limitations of data gloves. This system utilizes an Arduino based micro controller as well as a single flex sensor on each finger. Feedback from the Arduinos analog to digital converter can be used to infer objects dimensional properties, the reactions of each individual finger will differ with respect to the size and shape of a grasped object. In this work, we report its use in statistically differentiating stationary objects of spherical and cylindrical shapes of varying radii regardless of the variations introduced by gloves users. Using our sensor embedded glove system, we explored the practicability of object classification based on the tactile sensor responses from each finger of the smart glove. An estimated standard error of the mean was calculated from each of the of five fingers averaged flex sensor readings. Consistent with the literature, we found that there is a systematic dependence between an objects shape, dimension and the flex sensor readings. The sensor output from at least one finger, indicated a non-overlapping confidence interval when comparing spherical and cylindrical objects of the same radius. When sensing spheres and cylinders of varying sizes, all five fingers had a categorically varying reaction to each shape. We believe that our findings could be used in machine learning models for real-time object identification.