Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Approaches for Reinforcement Learning in Parameterized Action Space
Paper and Code
Oct 23, 2018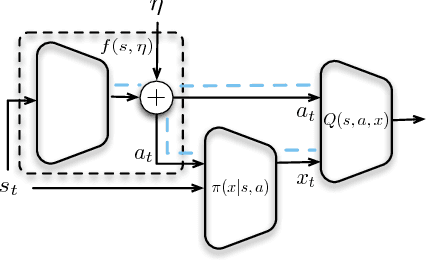

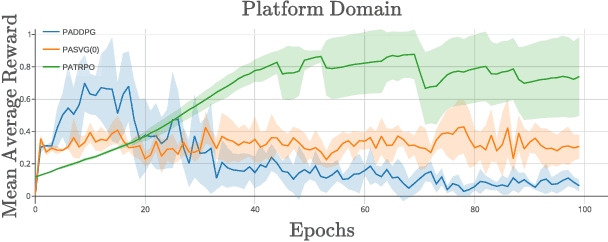
We explore Deep Reinforcement Learning in a parameterized action space. Specifically, we investigate how to achieve sample-efficient end-to-end training in these tasks. We propose a new compact architecture for the tasks where the parameter policy is conditioned on the output of the discrete action policy. We also propose two new methods based on the state-of-the-art algorithms Trust Region Policy Optimization (TRPO) and Stochastic Value Gradient (SVG) to train such an architecture. We demonstrate that these methods outperform the state of the art method, Parameterized Action DDPG, on test domains.
* Accepted in AAAI 18 Spring Symposium
View paper on