 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraphTCN: Spatio-Temporal Interaction Modeling for Human Trajectory Prediction
Paper and Code
Mar 26, 2020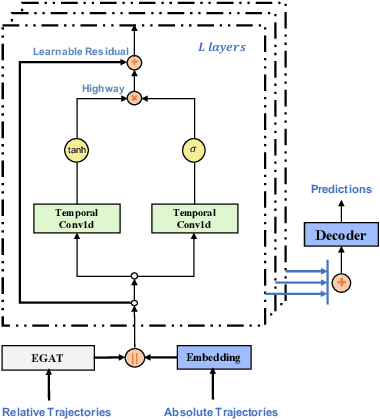

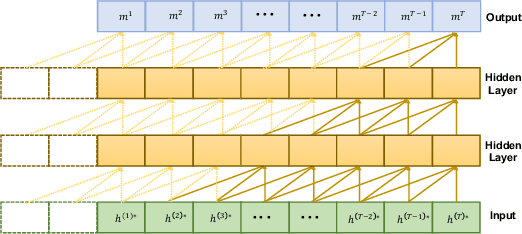

Trajectory prediction is a fundamental and challenging task to forecast the future path of the agents in autonomous applications with multi-agent interaction, where the agents need to predict the future movements of their neighbors to avoid collisions. To respond timely and precisely to the environment, high efficiency and accuracy are required in the prediction. Conventional approaches, e.g., LSTM-based models, take considerable computation costs in the prediction, especially for the long sequence prediction. To support a more efficient and accurate trajectory prediction, we instead propose a novel CNN-based spatial-temporal graph framework GraphTCN, which captures the spatial and temporal interactions in an input-aware manner. The spatial interaction between agents at each time step is captured with an edge graph attention network (EGAT), and the temporal interaction across time step is modeled with a modified gated convolutional network (CNN). In contrast to conventional models, both the spatial and temporal modeling in GraphTCN are computed within each local time window. Therefore, GraphTCN can be executed in parallel for much higher efficiency, and meanwhile with accuracy comparable to best-performing approaches. Experimental results confirm that GraphTCN achieves noticeably better performance in terms of both efficiency and accuracy compared with state-of-the-art methods on various trajectory prediction benchmark datasets.