 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFilling-Based Techniques Applied to Object Projection Feature Estimation
Paper and Code
Feb 29, 2012
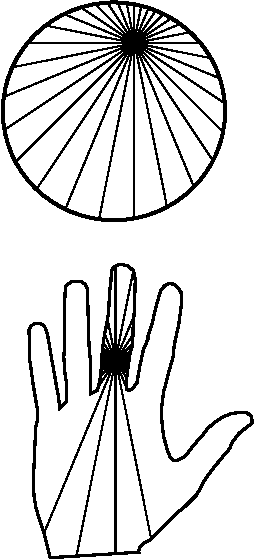
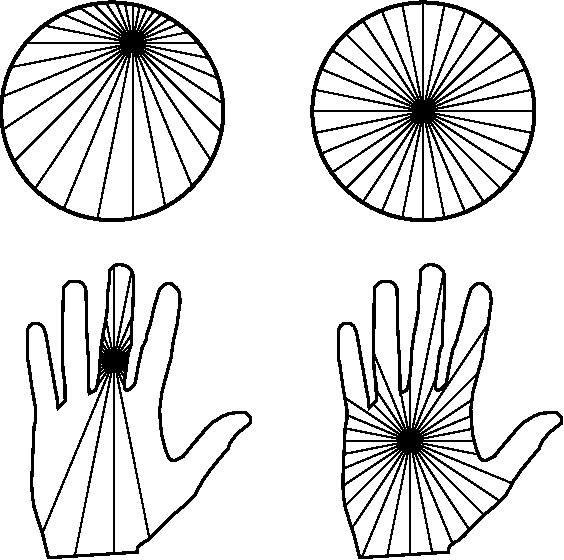
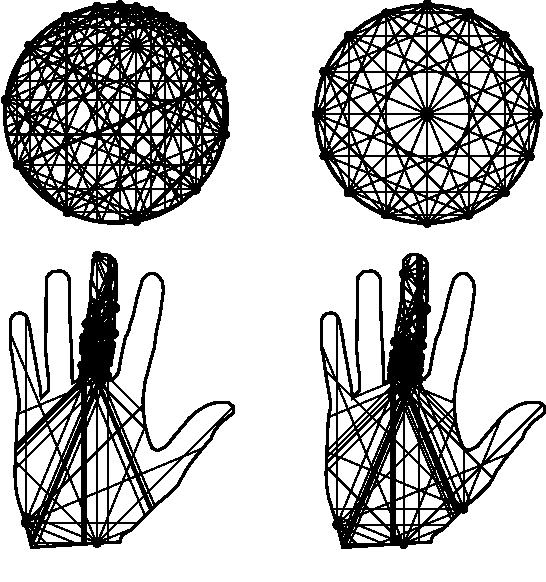
3D motion tracking is a critical task in many computer vision applications. Unsupervised markerless 3D motion tracking systems determine the most relevant object in the screen and then track it by continuously estimating its projection features (center and area) from the edge image and a point inside the relevant object projection (namely, inner point), until the tracking fails. Existing object projection feature estimation techniques are based on ray-casting from the inner point. These techniques present three main drawbacks: when the inner point is surrounded by edges, rays may not reach other relevant areas; as a consequence of that issue, the estimated features may greatly vary depending on the position of the inner point relative to the object projection; and finally, increasing the number of rays being casted and the ray-casting iterations (which would make the results more accurate and stable) increases the processing time to the point the tracking cannot be performed on the fly. In this paper, we analyze an intuitive filling-based object projection feature estimation technique that solves the aforementioned problems but is too sensitive to edge miscalculations. Then, we propose a less computing-intensive modification to that technique that would not be affected by the existing techniques issues and would be no more sensitive to edge miscalculations than ray-casting-based techniques.