Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFair navigation planning: a humanitarian robot use case
Paper and Code
Jun 25, 2020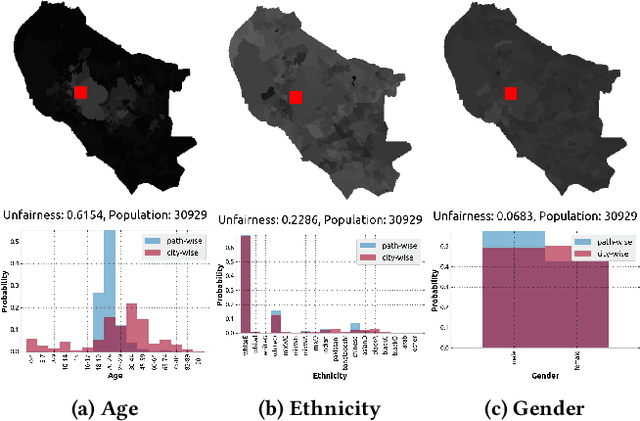
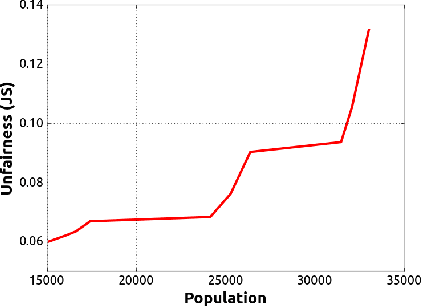
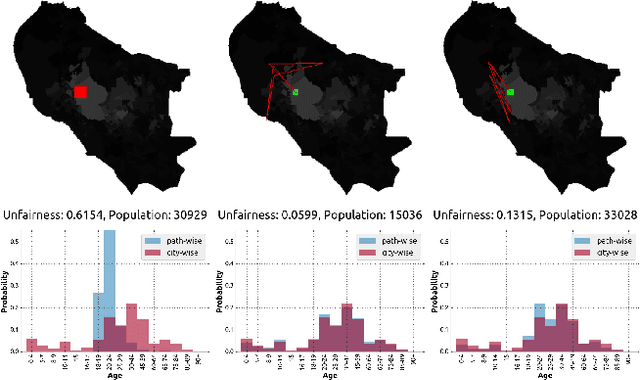
In this paper we investigate potential issues of fairness related to the motion of mobile robots. We focus on the particular use case of humanitarian mapping and disaster response. We start by showing that there is a fairness dimension to robot navigation, and use a walkthrough example to bring out design choices and issues that arise during the development of a fair system. We discuss indirect discrimination, fairness-efficiency trade-offs, the existence of counter-productive fairness definitions, privacy and other issues. Finally, we conclude with a discussion of the potential of our methodology as a concrete responsible innovation tool for eliciting ethical issues in the design of autonomous systems.
* Appeared at the KDD 2020 Workshop on Humanitarian Mapping
View paper on