 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancement performance of road recognition system of autonomous robots in shadow scenario
Paper and Code
Jan 09, 2014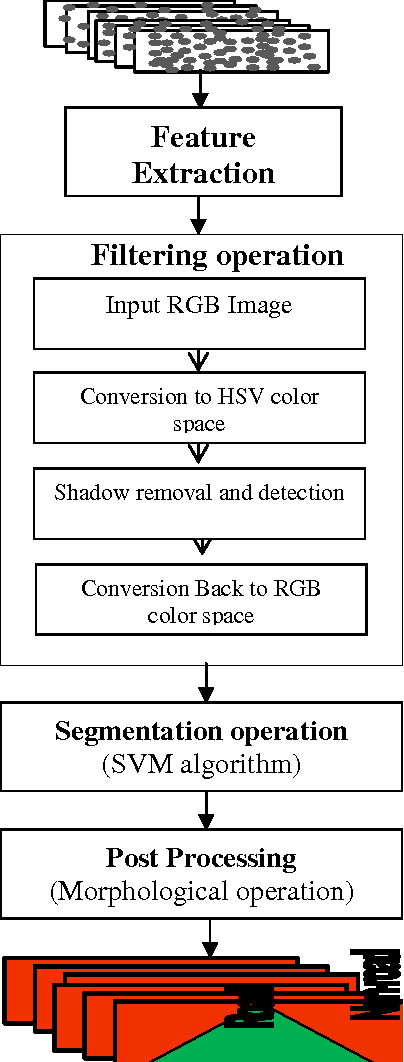
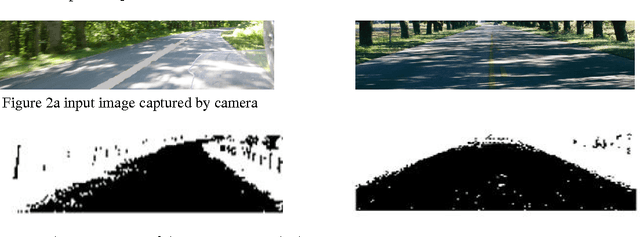
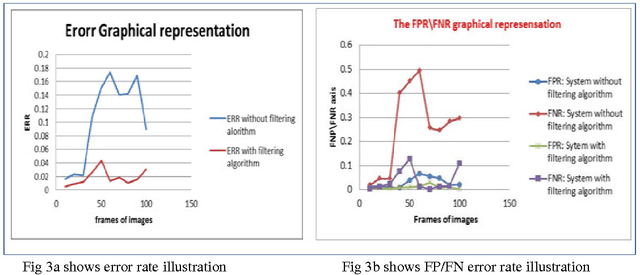
Road region recognition is a main feature that is gaining increasing attention from intellectuals because it helps autonomous vehicle to achieve a successful navigation without accident. However, different techniques based on camera sensor have been used by various researchers and outstanding results have been achieved. Despite their success, environmental noise like shadow leads to inaccurate recognition of road region which eventually leads to accident for autonomous vehicle. In this research, we conducted an investigation on shadow and its effects, optimized the road region recognition system of autonomous vehicle by introducing an algorithm capable of detecting and eliminating the effects of shadow. The experimental performance of our system was tested and compared using the following schemes: Total Positive Rate (TPR), False Negative Rate (FNR), Total Negative Rate (TNR), Error Rate (ERR) and False Positive Rate (FPR). The performance result of the system improved on road recognition in shadow scenario and this advancement has added tremendously to successful navigation approaches for autonomous vehicle.