 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Modelling and Adaptive Traction Control for Mobile Robots
Paper and Code
Nov 08, 2004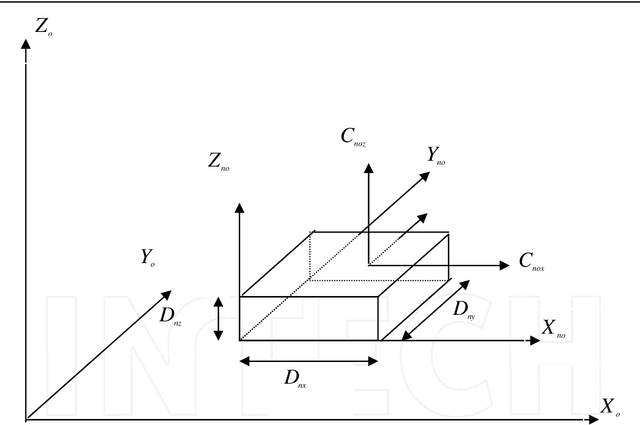
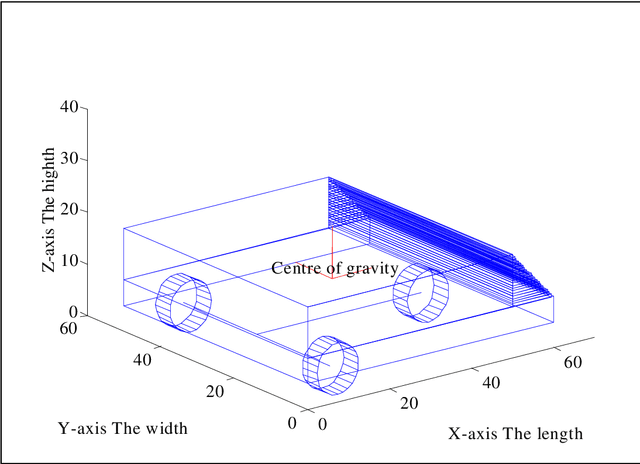
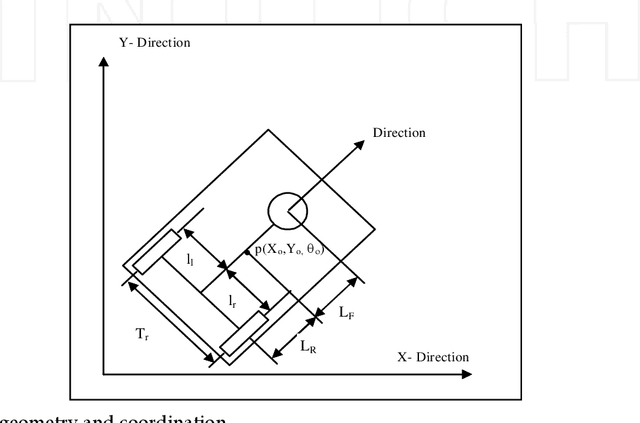
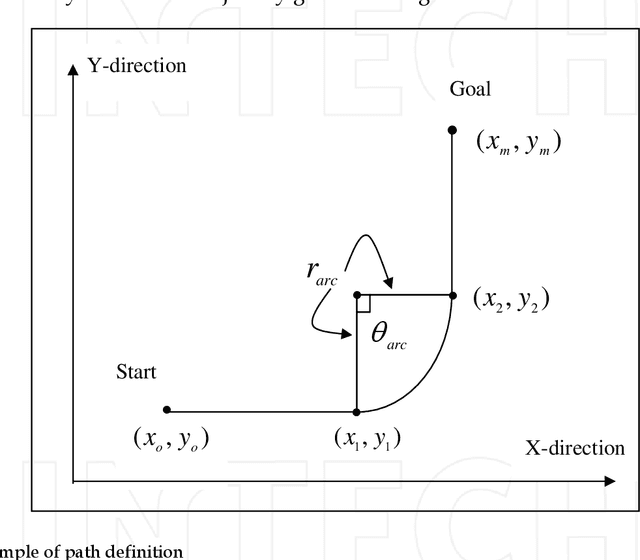
Mobile robots have received a great deal of research in recent years. A significant amount of research has been published in many aspects related to mobile robots. Most of the research is devoted to design and develop some control techniques for robot motion and path planning. A large number of researchers have used kinematic models to develop motion control strategy for mobile robots. Their argument and assumption that these models are valid if the robot has low speed, low acceleration and light load. However, dynamic modelling of mobile robots is very important as they are designed to travel at higher speed and perform heavy duty work. This paper presents and discusses a new approach to develop a dynamic model and control strategy for wheeled mobile robot which I modelled as a rigid body that roles on two wheels and a castor. The motion control strategy consists of two levels. The first level is dealing with the dynamic of the system and denoted as Low level controller. The second level is developed to take care of path planning and trajectory generation.