 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Endpoint Object Conveyance Using a Large-Scale Actuator Network
Paper and Code
Apr 15, 2016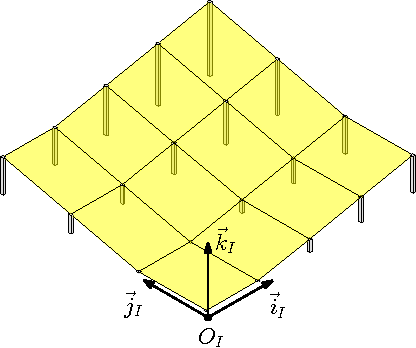
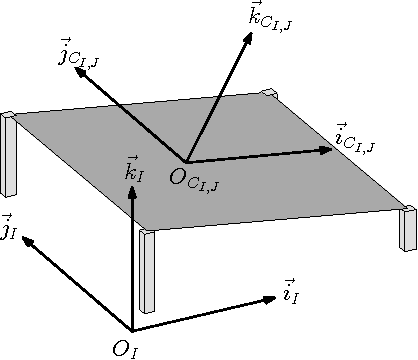
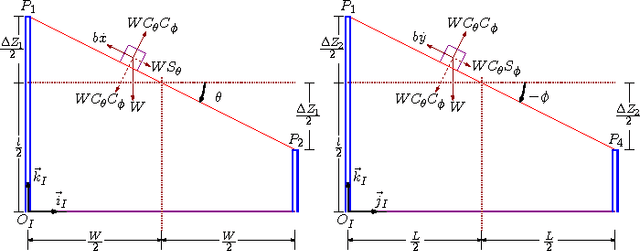
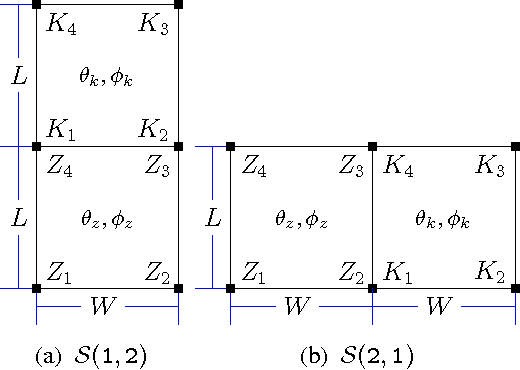
Large-Scale Actuator Networks (LSAN) are a rapidly growing class of electromechanical systems. A prime application of LSANs in the industrial sector is distributed manipulation. LSAN's are typically implemented using: vibrating plates, air jets, and mobile multi-robot teams. This paper investigates a surface capable of morphing its shape using an array of linear actuators to impose two dimensional translational movement on a set of objects. The collective nature of the actuator network overcomes the limitations of the single Degree of Freedom (DOF) manipulators, and forms a complex topography to convey multiple objects to a reference location. A derivation of the kinematic constraints and limitations of an arbitrary multi-cell surface is provided. These limitations determine the allowable actuator alignments when configuring the surface. A fusion of simulation and practical results demonstrate the advantages of using this technology over static feeders.