 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDSNet for Real-Time Driving Scene Semantic Segmentation
Paper and Code
Dec 06, 2018
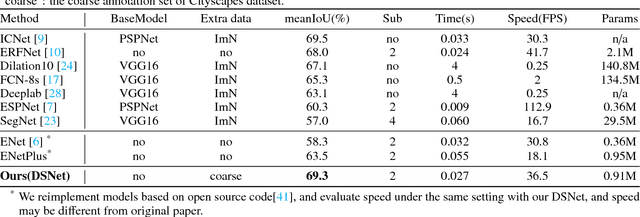
We focus on the very challenging task of semantic segmentation for autonomous driving system. It must deliver decent semantic segmentation result for traffic critical objects real-time. In this paper, we propose a very efficient yet powerful deep neural network for driving scene semantic segmentation termed as Driving Segmentation Network (DSNet). DSNet achieves state-of-the-art balance between accuracy and inference speed through efficient units and architecture design inspired by ShuffleNet V2 and ENet. More importantly, DSNet highlights classes most critical with driving decision making through our novel Driving Importance-weighted Loss. We evaluate DSNet on Cityscapes dataset, our DSNet achieves 71.8% mean Intersection-over-Union (IoU) on validation set and 69.3% on test set. Class-wise IoU scores show that Driving Importance-weighted Loss could improve most driving critical classes by a large margin. Compared with ENet, DSNet is 18.9% more accurate and 1.1+ times faster which implies great potential for autonomous driving application.