 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDo Self-Supervised and Supervised Methods Learn Similar Visual Representations?
Paper and Code
Oct 01, 2021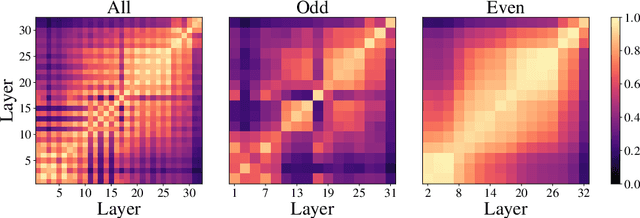
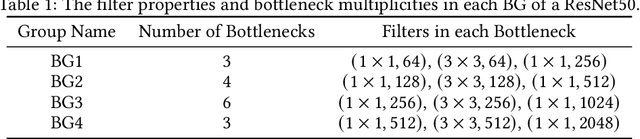
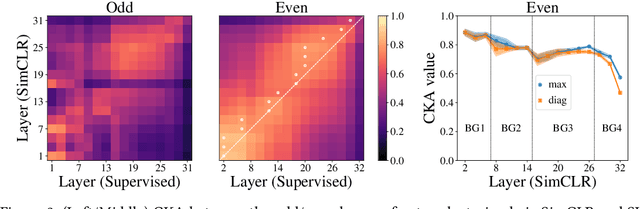
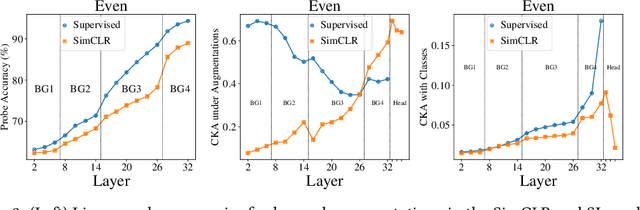
Despite the success of a number of recent techniques for visual self-supervised deep learning, there remains limited investigation into the representations that are ultimately learned. By using recent advances in comparing neural representations, we explore in this direction by comparing a constrastive self-supervised algorithm (SimCLR) to supervision for simple image data in a common architecture. We find that the methods learn similar intermediate representations through dissimilar means, and that the representations diverge rapidly in the final few layers. We investigate this divergence, finding that it is caused by these layers strongly fitting to the distinct learning objectives. We also find that SimCLR's objective implicitly fits the supervised objective in intermediate layers, but that the reverse is not true. Our work particularly highlights the importance of the learned intermediate representations, and raises important questions for auxiliary task design.