 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDevelopment of a conversing and body temperature scanning autonomously navigating robot to help screen for COVID-19
Paper and Code
Jun 18, 2021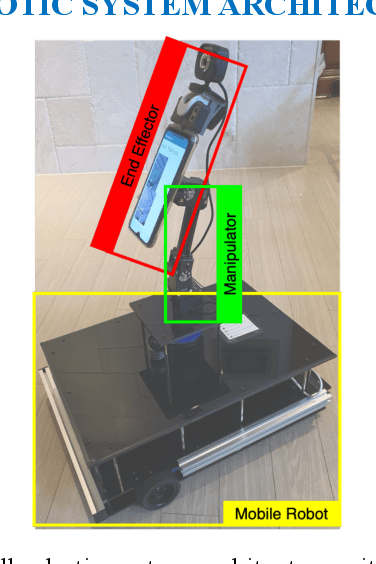

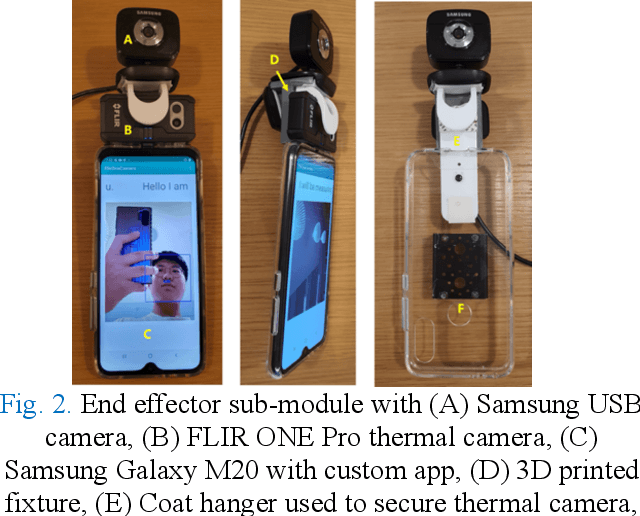
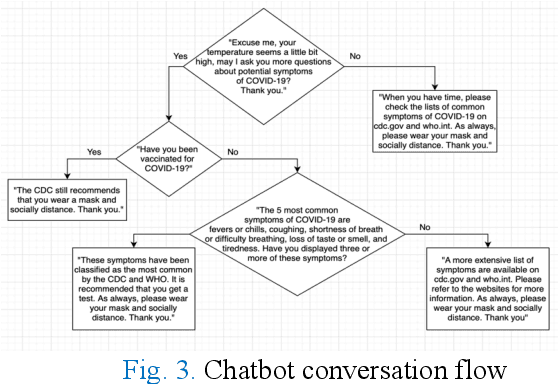
Throughout the COVID-19 pandemic, the most common symptom displayed by patients has been a fever, leading to the use of temperature scanning as a preemptive measure to detect potential carriers of the virus. Human employees with handheld thermometers have been used to fulfill this task, however this puts them at risk as they cannot be physically distanced and the sequential nature of this method leads to great inconveniences and inefficiency. The proposed solution is an autonomously navigating robot capable of conversing and scanning people's temperature to detect fevers and help screen for COVID-19. To satisfy this objective, the robot must be able to (1) navigate autonomously, (2) detect and track people, and (3) get individuals' temperature reading and converse with them if it exceeds 38{\deg}C. An autonomously navigating mobile robot is used with a manipulator controlled using a face tracking algorithm, and an end effector consisting of a thermal camera, smartphone, and chatbot. The goal is to develop a functioning solution that performs the above tasks. In addition, technical challenges encountered and their engineering solutions will be presented, and recommendations will be made for enhancements that could be incorporated when approaching commercialization.