 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetection and blind channel estimation for UAV-aided wireless sensor networks in smart cities under mobile jamming attack
Paper and Code
May 25, 2021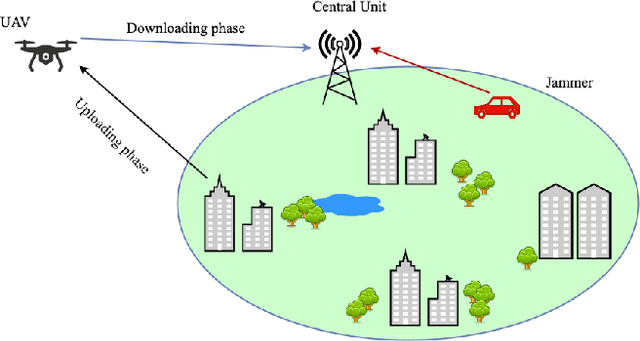
There exist several ways of integrating unmanned aerial vehicles (UAVs) into wireless sensor networks (WSNs) for smart city applications. Among the others, a UAV can be employed as a relay in a "store-carry and forward" fashion by uploading data from ground sensors and meters and, then, downloading it to a central unit. However, both the uploading and downloading phases can be prone to potential threats and attacks. As a legacy from traditional wireless networks, the jamming attack is still one of the major and serious threats to UAV-aided communications, especially when the jammer is mobile, too, e.g., it is mounted on an UAV or inside a terrestrial vehicle. In this paper, we investigate anti-jamming communications in UAV-aided WSNs operating over doubly-selective channels. In such a scenario, the signals transmitted by the legitimate transmitters (sensors and meters in the uploading phase or the UAV in the downloading phase) and the malicious mobile jammer undergo both time dispersion due to multipath propagation effects and frequency dispersion caused by Doppler shifts. To suppress the jamming signal, we propose a blind physical-layer technique that jointly exploits amplitudes, phases, time delays, and Doppler shifts differences between the two superimposed signals. Such parameters are estimated from data through the use of algorithms exploiting the almost-cyclostationarity properties of the received signal. Simulation results corroborate the antijamming capabilities of the proposed method, for different mobility scenario of the jammer.