 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep RL-based Autonomous Navigation of Micro Aerial Vehicles (MAVs) in a complex GPS-denied Indoor Environment
Paper and Code
Apr 08, 2025
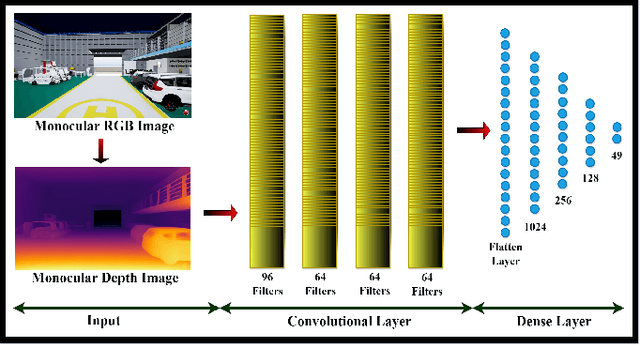
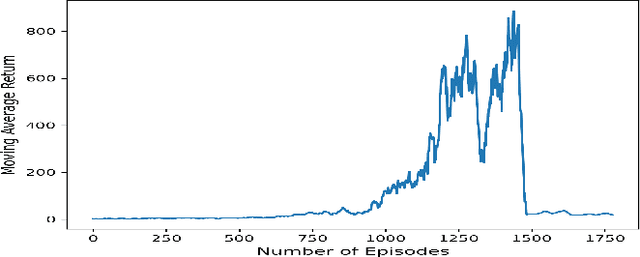
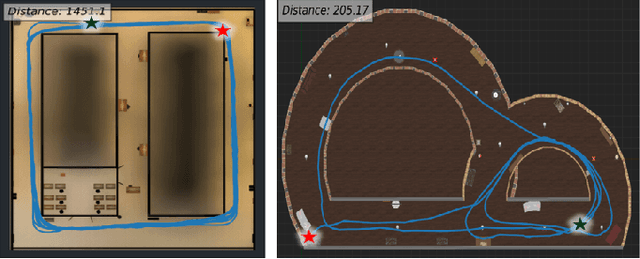
The Autonomy of Unmanned Aerial Vehicles (UAVs) in indoor environments poses significant challenges due to the lack of reliable GPS signals in enclosed spaces such as warehouses, factories, and indoor facilities. Micro Aerial Vehicles (MAVs) are preferred for navigating in these complex, GPS-denied scenarios because of their agility, low power consumption, and limited computational capabilities. In this paper, we propose a Reinforcement Learning based Deep-Proximal Policy Optimization (D-PPO) algorithm to enhance realtime navigation through improving the computation efficiency. The end-to-end network is trained in 3D realistic meta-environments created using the Unreal Engine. With these trained meta-weights, the MAV system underwent extensive experimental trials in real-world indoor environments. The results indicate that the proposed method reduces computational latency by 91\% during training period without significant degradation in performance. The algorithm was tested on a DJI Tello drone, yielding similar results.