 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning of Appearance Models for Online Object Tracking
Paper and Code
Jul 09, 2016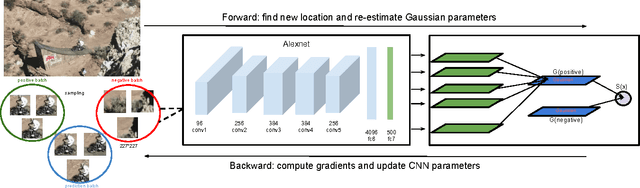

This paper introduces a novel deep learning based approach for vision based single target tracking. We address this problem by proposing a network architecture which takes the input video frames and directly computes the tracking score for any candidate target location by estimating the probability distributions of the positive and negative examples. This is achieved by combining a deep convolutional neural network with a Bayesian loss layer in a unified framework. In order to deal with the limited number of positive training examples, the network is pre-trained offline for a generic image feature representation and then is fine-tuned in multiple steps. An online fine-tuning step is carried out at every frame to learn the appearance of the target. We adopt a two-stage iterative algorithm to adaptively update the network parameters and maintain a probability density for target/non-target regions. The tracker has been tested on the standard tracking benchmark and the results indicate that the proposed solution achieves state-of-the-art tracking results.