 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConvex MPC and Thrust Allocation with Deadband for Spacecraft Rendezvous
Paper and Code
Apr 05, 2024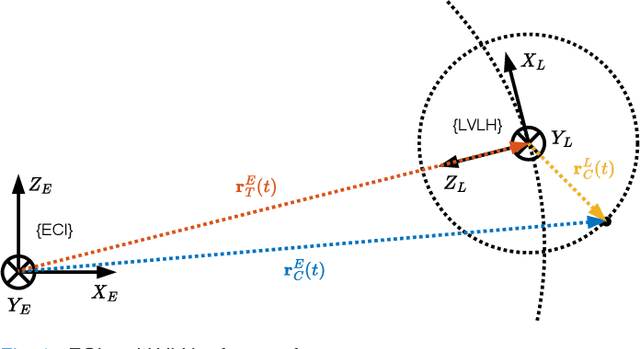
This paper delves into a rendezvous scenario involving a chaser and a target spacecraft, focusing on the application of Model Predictive Control (MPC) to design a controller capable of guiding the chaser toward the target. The operational principle of spacecraft thrusters, requiring a minimum activation time that leads to the existence of a control deadband, introduces mixed-integer constraints into the optimization, posing a considerable computational challenge due to the exponential complexity on the number of integer constraints. We address this complexity by presenting two solver algorithms that efficiently approximate the optimal solution in significantly less time than standard solvers, making them well-suited for real-time applications.