 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConstraint-based Task Specification and Trajectory Optimization for Sequential Manipulation
Paper and Code
Aug 19, 2022
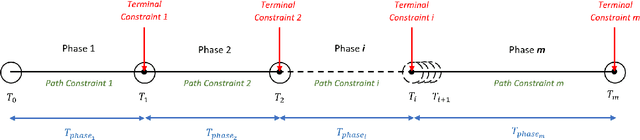


To economically deploy robotic manipulators the programming and execution of robot motions must be swift. To this end, we propose a novel, constraint-based method to intuitively specify sequential manipulation tasks and to compute time-optimal robot motions for such a task specification. Our approach follows the ideas of constraint-based task specification by aiming for a minimal and object-centric task description that is largely independent of the underlying robot kinematics. We transform this task description into a non-linear optimization problem. By solving this problem we obtain a (locally) time-optimal robot motion, not just for a single motion, but for an entire manipulation sequence. We demonstrate the capabilities of our approach in a series of experiments involving five distinct robot models, including a highly redundant mobile manipulator.